低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进.
基于以上研究,提出一种自适应领头雀引导和中心变异⁃进化因子的麻雀搜索算法(Adaptive Leading Sparrow Guide and Center Mutation⁃evolution Factor Sparrow Search Algorithm,ALCE⁃SSA),在保证快速寻优的前提下,获得无人机突防的最优路径.
1 无人机三维突防环境建模
在处理三维环境的无人机突防问题时,为了达到快速寻优的目的,假设已通过测绘得到所有的静态环境,需要根据已知的参数将地形、威胁源构造建模,然后根据建模以及无人机自身约束求出代价总和.
1.1 地形约束
将无人机的突防环境[15 -16 ] 分为平原和山地两种地形,其中山峰影响最大.三维环境下的山峰建模如下:
z x , y = h ⋅ e - x - x 0 2 λ 1 - y - y 0 2 λ 2 2 (1)
其中,x , y x 0 , y 0 h 为高度参数,λ 1 和λ 2 反映山峰的陡峭程度.在飞行中,离地面0.05~2.5 km高度处适于飞行,航迹点的地形威胁代价如下:
f Z , j = K Z , h j - Z j ≤ 0 K Z ' , 0 ≤ h j - Z j ≤ 0.05 0 , 0.05 ≤ h j - Z j ≤ 2.5 K Z ' , 2.5 ≤ h j - Z j (2)
其中, K Z , K Z ' hj 为第j 个航迹点的海拔高度,Zj 为第j 个航迹点的地形高度,fZ,j 为第j 个航迹点对应的威胁代价.此外,低空突防需考虑高程代价,航迹点j 的高程代价如下所示:
f H , j = h j (3)
地形约束还需考虑飞行边界范围和最大飞行高度,保证无人机的可控性.设定飞行水平范围为x m i n , y m i n = 0,0 x m a x , y m a x = 100,100 z m a x = 5 .
1.2 威胁模型约束
雷达探测、防空火炮、地空导弹等是无人机突防的主要威胁来源.地形中的威胁源建模原理是根据威胁的性质计算威胁的作用半径和作用空间形状,以等效地形来代替[17 ] .具体建模如下:
(1)雷达威胁:在雷达区内,简化的雷达探测概率模型如下:
P 0 = 1 / r 4 (4)
(2)防空火炮威胁:在防空火炮区内,毁伤概率可表示为:
P G = 1 / r (5)
(3)地空导弹威胁:无人机在导弹区半径内被击中的可能性为:
P M = R m a x 4 r 4 + R m a x 4 (6)
(4)禁飞区威胁:现实中存在一些气候和环境非常恶劣的区域,称为禁飞区.禁飞区的约束为:
P J = K J (7)
将威胁源等效为地形模型,假设距离威胁源中心越近,威胁代价越大,地形越高,反之则越低.因此,可以将威胁源等效为:
Δ h x , y = 0 , R ≥ R m a x , p K t h r × R m a x , p 2 - x - x p 2 + y - y p 2 e l s e (8)
其中,K t h r p 个威胁源中心的水平坐标为x p , y p p 个威胁源的最大半径为R m a x , p R 为坐标点到威胁源中心的距离.定义每个航迹点在威胁区域的计算代价如下:
f T , j p = P 0 / P G / P M / P J , r j , p ≤ R m a x , p 0 , e l s e (9)
其中,rj,p 为第j 个航迹点到威胁源p 中心的直线距离,P 0 ,P G ,P M 和P J 分别为雷达、火炮、导弹、禁飞区的代价函数,fT,jp 为航迹点j 到威胁源p 中心的代价.
1.3 无人机约束
无人机在飞行过程中受自身的物理约束,主要包括转弯角α 、下滑及爬升角β 以及燃油代价(路程).各物理约束分别为:
J α _ a n g l e , j = 0 , α ≤ α m a x K α , α > α m a x (10)
J β _ a n g l e , j = 0 , β ≤ β m a x K β , β > β m a x (11)
J L , j = l j , j > 1 0 , j = 1 (12)
其中,K α K β J α _ a n g e l , j J β _ a n g e l , j j 个航迹点对应α 和β 的代价函数,J L , j j 个航迹点对应的航程.综合各代价函数,可得出第j 个航迹点的无人机自身约束代价函数为:
f J , j = J α _ a n g l e , j + J β _ a n g l e , j + J L , j (13)
1.4 航迹代价函数
将地形约束、高程代价、威胁模型约束及无人机自身物理约束的代价加权综合起来就构成最终的无人机代价函数,如下所示:
F = ∑ j = 1 d σ 1 f Z , j + σ 2 f H , j + σ 3 ∑ p = 1 w f T , j p + σ 4 f J , j (14)
其中,F 为整条航迹的代价,σ 1 ,σ 2 ,σ 3 和σ 4 为各代价的权重,d 为航迹点的总数,w 为威胁源的总数.
2 改进的SSA算法
2.1 SSA算法
麻雀是一种聪明、记忆力较好的鸟类,喜欢群居活动.SSA[13 ] 中的麻雀种群分为觅食发现者和抢食物的加入者,两者角色可以互换;同时,还选择了一定比例的麻雀作为侦察的警戒者,一有危险便飞向别处.整个麻雀种群的位置矩阵以及适应度表示如下:
X = x 11 x 12 ⋯ x 1 d x 21 x 22 ⋯ x 2 d ⋮ ⋮ ⋱ ⋮ x n 1 x n 2 ⋯ x n d (15)
F X = f x 11 , x 12 , ⋯ , x 1 d f x 21 , x 22 , ⋯ , x 2 d ⋮ f x n 1 , x n 2 , ⋯ , x n d (16)
其中,xij 为j 维空间内第i 只麻雀的位置,矩阵FX 表示麻雀种群的适应度值.
迭代寻优过程中,麻雀种群中的发现者负责觅食和指导整个种群移动,发现者位置更新如下:
x i , j t + 1 = x i , j t ⋅ e x p - i ζ × i t e r m a x , R 2 < S T x i , j t + Q × L , R 2 ≥ S T (17)
其中,x i , j t t 代中第i 个个体的第j 维位置,ζ 为0,1 Q 为一个标准正态分布随机数,L 是一行多维的全一矩阵,R 2 0,1 ST 为警戒阈值,取0.6.可以看出,当R 2 ST 时,当代发现者按正态分布随机移动到父代位置附近;当R 2 ST ,麻雀向原点收敛,并且随着迭代次数t 的变大,步长取值范围逐渐由0,1 0,0.4
x i , j t + 1 = Q ⋅ e x p x w o r s t t - x i , j t i 2 , i > n 2 x p t + x i , j t - x p t ⋅ A + ⋅ L , i ≤ n 2 (18)
其中,X p t t 代种群发现者占据的最佳位置,x w o r s t t A 为只含1或-1元素的1×d 的矩阵,定义矩阵运算A +
A + = A T A A T - 1 (19)
在麻雀种群中随机选取20%的个体作为警戒者,则这些个体对全体的影响如下:
x i , j t + 1 = x b e s t t + δ ⋅ x i , j t - x b e s t t , f i ≠ f g x i , j t + k ⋅ x i , j t - x b e s t t f i - f w + ε , f i = f g (20)
其中,x b e s t t δ 是符合正态分布的步长控制参数,均值为0,方差为1;k 是- 1,1 f i f g f w ε 为不为零的极小值,设置为1 - 8
综合SSA发现者、加入者、警戒者的更新方式可知,SSA在求解原点附近解时寻优性能较好,一旦解离原点较远,性能就不如差分进化算法、遗传算法等一些经典智能算法.同时,由于SSA的收敛方式是跳跃式的,容易陷入局部最优,因此必须进一步改进.
2.2 基于改进的麻雀搜索算法的无人机三维路径规划
2.2.1 航迹编码
在航迹的仿真三维图中,路径为一条可视化的实线.本文算法中每条路径由每只麻雀代表,代价最小的麻雀代表最优路径.定义种群中的一只麻雀Xi 为一条路径,X i = x i 1 ,
x i 2 , … , x i d d 个航迹点,每个航迹点xij 具有空间三维的属性x , y , z . 利用SSA规划三维的无人机突防路径时,首先确定路径总数n 和航迹点数d ,即麻雀种群数量n 和麻雀个体维度d ,然后将三维的坐标变化等效为二维的坐标变化,即将x 坐标等距离固定,y 和z 进行迭代更新.
2.2.2 基于随机Tent映射的种群初始化
由于SSA的初始种群是随机产生的,可能会导致种群多样性不足,对迭代影响很大,采用混沌映射[18 -19 ] 对于初始化质量有不错的效果.本文采用Tent映射来提高初始种群质量,y,z 维度取值变化曲线如图1 所示.
图1
图1
Tent混沌映射变化曲线
Fig.1
Variation curve of Tent chaotic map
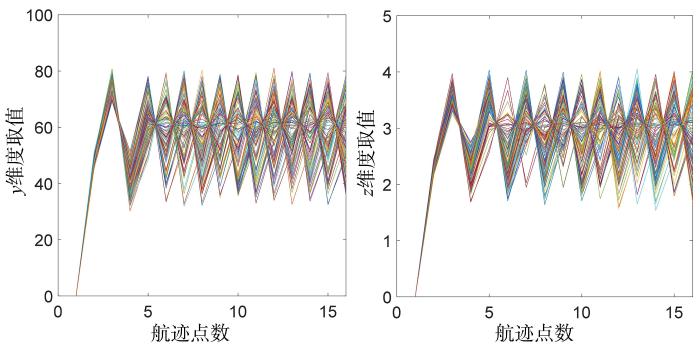
现有Tent映射生成的混沌序列分布y 维度集中在30,80 z 维度集中在1.5,4 . 因此,本文设计了一种随机Tent映射方法,公式如下:
v i , j + 1 = ψ × v i , j + s × c o s v i , j , v i , j < 0.5 ψ × 1 - v i , j + s × c o s v i , j , v i , j ≥ 0.5 (21)
其中,i 为种群规模(i = 1,2 , … , n j 为个体维数(j = 1,2 , … , d s 为0,1 ψ 为混沌参数.对该式取初值后,可以得到n ×d 个混沌序列.将混沌序列代入个体位置公式求出种群的个体位置,公式如下:
x i , j = L b j + v i , j U b j - L b j (22)
其中,U b j L b j j 维搜索空间的上、下边界.如图2 所示,随机Tent映射生成的混沌序列分布y 维度和z 维度分布更均匀.
图2
图2
随机Tent混沌映射变化曲线
Fig.2
Variation curve of random Tent chaotic map
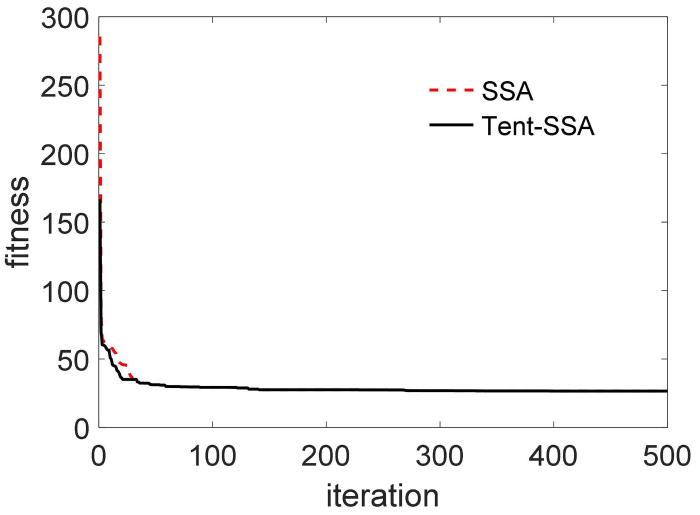
对改进初始化算法进行实验验证,使用改进Tent映射初始化种群的SSA算法并和原始SSA进行对比实验,结果如图3 所示.由图可知,改进算法有效降低了初始化种群的代价,加快了迭代速度.
图3
图3
代价变化曲线图
Fig.3
Cost variation curve
2.2.3 自适应领头雀引导策略
更新式(17)可知,发现者位置的更新是在父代的基础上寻优,此策略没有考虑父代的不利影响.而本文作者观察到,自然界中的麻雀群在觅食时通常由一个体型稍大、基因更优秀的个体充当领头雀.鉴于此,本文设计了一种新的自适应领头雀引导策略来完善SSA算法,使迭代更新不仅受父代的影响,还受领头雀的影响.加入领头雀引导在前期会不利于种群全局探索能力的提升,所以,为了同时增加算法的前期全局探索和后期局部寻优的能力,在上述最优个体(领头雀)引导策略的基础上再添加自适应权重,这里新的发现者的更新公式修订为:
x i t + 1 = 1 2 × ω ⋅ x i t + 1 - ω ⋅ x 1 t ⋅ e x p - i α × i t e r m a x , R 2 < S T x i t + Q × L , R 2 ≥ S T (23)
其中,x 1 t t 代中最优个体,ω 为权重因子.更新公式如下:
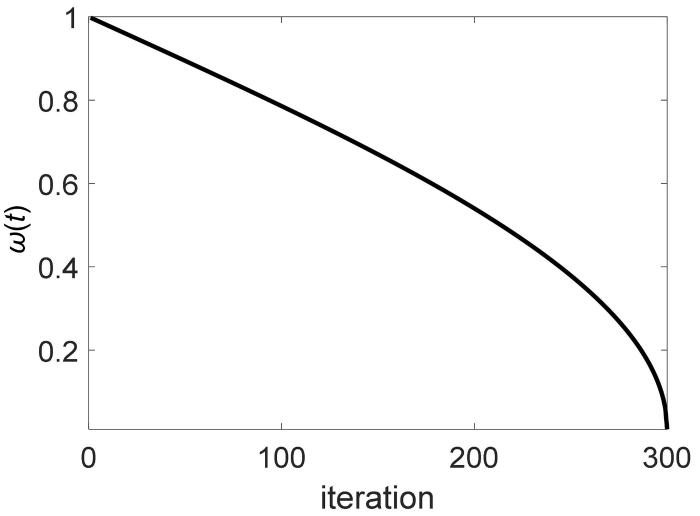
ω t = ω m a x - ω m a x - ω m i n × 2 π × a r c s i n t T m a x (24)
其中,ω m a x , ω m i n y 维度更新ω ω m a x 和 ω m i n z 维度的更新取0.1和0.005.y 维度的ω 系数变化曲线如图4 所示,z 维度变化趋势相似,不再放图.
图4
图4
ω 系数变化曲线图
Fig.4
Variation curves of ω
迭代前期快速减小的权重可能会导致陷入局部最优.本文中ω 的改变在前中期减小较为缓慢,使得发现者的更新受父代的影响较大,降低算法早熟的可能性;后期的减小很迅速,受领头雀的影响较大,提高了算法的精度,使寻找到的路径适应度更好.
对自适应领头雀引导策略进行实验验证,发现者更新公式采用式(23),并和原始SSA进行对比实验,结果如图5 所示.可知,改进算法可以有效加快迭代速度.
图5
图5
自适应领头雀引导策略与原始SSA收敛曲线对比
Fig.5
Convergence curves of Adaptive Leading Sparrow Guide strategy and original SSA
2.2.4 中心变异⁃进化因子的设计
SSA在迭代过程中容易陷入局部最优,导致寻优路径停滞不变,所以,本文提出一种基于个体中心的变异方法,效果如图6 所示.红色虚线为初始路径点连成的线,利用初始点计算其中心位置;黑色实线中的每个点由初始点与中心点的连线上随机取一个点得来,将每个点连接起来就又是一条路径.
图6
图6
中心变异效果图
Fig.6
Central variation effect diagram
为加快迭代速度,只选取最优个体进行中心变异,设X m = x 1 , x 2 , … , x d d 个点,则一个离散均匀的整体中心G 为:
G = x 1 + x 2 + ⋯ + x d d (25)
g 1 x = x ¯ j = r a n d x j , G , j = 1,2 , ⋯ , d (26)
采用弱肉强食的原则来设计进化部分,通过适应度值的好坏来对种群进行排序,按照顺序进化.可以看出,适应度好的个体有大概率保留下来,较差的个体大概率选择进化,公式如下:
g 2 x = x i = x i , s < P i x 1 - r a n d ⋅ x t 1 - x t 2 , e l s e (27)
其中,t 1 , t 2 n 个个体中的随机个体,且互不相同;x 1 rand 和s 为0~1的随机数;P i i 个个体对应的适应度级别,计算公式为:
P i = n - i + 1 n (28)
中心变异与进化过程都可以增加种群的多样性,扩大搜索范围.中心变异产生的解相对固定,而进化的解随机性大.本文融合了这两种策略:在算法前期,大概率选择中心变异;在算法后期,种群趋于稳定,此时较大概率采用进化,可以增大种群的随机性.通过中心变异⁃进化因子产生新解的计算公式可以表示为:
x i n e w = g 1 x , s < τ g 2 x , e l s e (29)
其中,g 1 x g 2 x τ
τ = 1 - t T m a x (30)
采用中心变异⁃进化因子求取新解之后,根据贪婪原则更新得到的新种群.
对中心变异⁃进化因子增加种群多样性进行实验验证,并和原始SSA进行对比实验,实验结果如图7 所示.由图可知,改进算法可以有效地加强全局勘探能力.
图7
图7
中心变异⁃进化因子策略和原始SSA收敛曲线对比
Fig.7
Convergence curves of center Mutation⁃evolution Factor strategy and orginial SSA
2.2.5 三次样条插值平滑路径
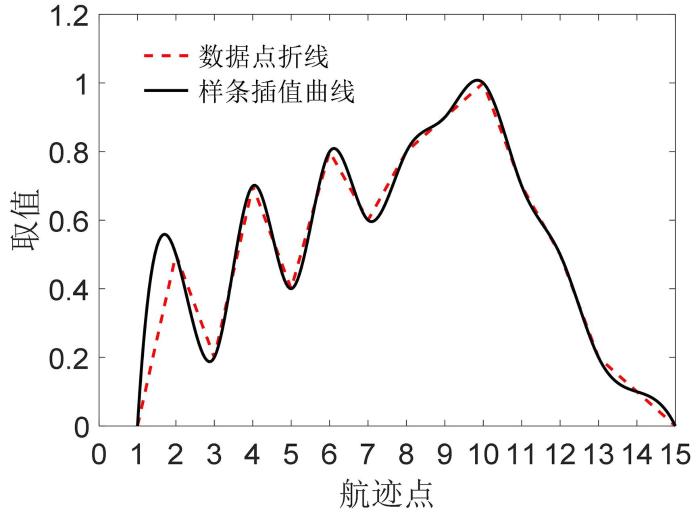
在无人机实际飞行中,通过算法寻优获得路径点,采用三次样条平滑路径.设最终无人机突防路径为L =(l 1 ,l 2 ,…,ld ),做三次样条插值,最终形成一条光滑路径,三次样条插值效果如图8 所示.
图8
图8
三次样条插值优化效果图
Fig.8
Optimization results of cubic spline interpolation
确定地形及威胁环境,确定航迹点数目d 与种群数目n ,根据式(21)与式(22)随机Tent映射初始化种群,计算种群的适应度并排序,选出最优个体与最差个体.
SSA在路径搜索上迭代速度较慢,借鉴麻雀种群秋冬季的种群大小不同,算法前期(秋季)使用大种群,后期(冬季)变为小种群,即种群大小变为原来的1/2.
选取适应度高的前PD 只个体作为发现者,根据自适应领头雀引导策略,即式(23)和式(24)来更新发现者;余下个体作为跟随者,根据式(18)和式(19)更新坐标位置;从种群中随机选取SD 只个体作为警戒者,根据式(20)更新坐标位置.
根据三维空间的大小限定航迹点的范围,若航迹点某一维超出边界,则用航迹点此维的边界值代替.
通过比较随机数与选择中心变异还是进化的概率的大小来选择对于种群是进行中心变异还是进化.中心变异是基于原最优个体的中心点来随机变异出一个新的个体,进化的原则是对于适应度好的大概率保留,适应度差的大概率淘汰.根据式(25)至式(30)来计算中心变异⁃进化后的种群,然后根据贪婪原则选择是否代替原种群.
判断是否达到迭代次数,未达到则跳回步骤2,达到则结束,输出最终的路径点并进行三次样条插值平滑路径.
图9
图9
本文算法流程图
Fig.9
Flow chart of this algorithm
3 算法测试
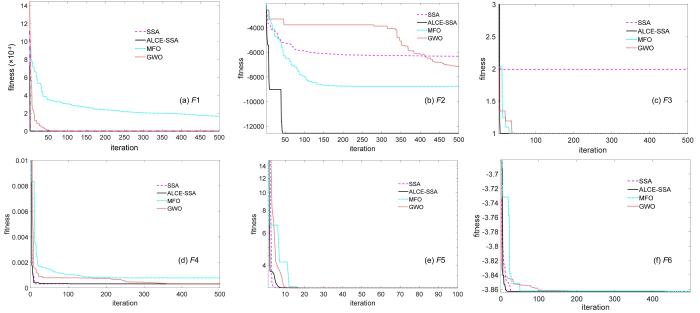
为了验证改进算法的性能,将本文算法与SSA[13 ] ,GWO[7 ] ,MFO[8 ] 进行比较,测试函数如
表1 所示.每个算法对各个测试函数运行30次,得到测试的平均值与标准差,如表2 所示.测试函数的收敛曲线如图10 所示.设置种群的规模为50,迭代次数为500.
图10
图10
本文算法和对比算法在六个测试函数上的收敛曲线
Fig.10
Function convergence curve of our algorithm and other algorithms on six test functions
表2 的平均值、标准差和图10 的函数收敛曲线表明,本文算法在求解各函数时都表现出优异性能.对于函数F 1,ALCE⁃SSA算法优于GWO和MFO;对于函数F 2和F 6,ALCE⁃SSA算法优于GWO,MFO和SSA;对于函数F 3,ALCE⁃SSA算法优于GWO,MFO和SSA;对于函数F 4和F 5,ALCE⁃SSA算法次于SSA,但优于GWO和MFO.上述函数中F 2是一种较复杂的测试函数,大部分优化算法无法找到最优值,SSA,GWO,MFO三种算法对于求解F 2的结果与实际最优解的误差极大,而本文算法在迭代50次左右找到最优值,证明本文算法在求解复杂函数时的优越性.通过六种函数测试对比了本文算法与其他三种算法的性能,证明提出的算法可以很好地改善SSA算法全局寻优的能力,表现较优.
4 无人机突防仿真计算与分析
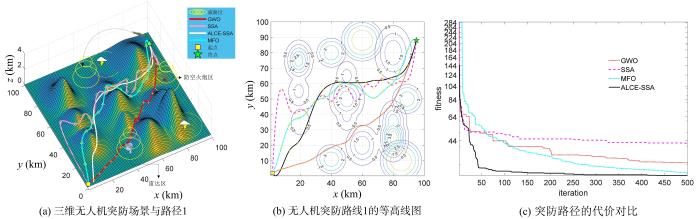
仿真平台的硬件是Intel Core i5⁃7300 HQ CPU 2.60 GHz、内存8 GB的计算机,编译软件为Matlab R2017b.两个测试地形区域为100 km×100 km,测试限高5 km,建立双模型增加算法的可信度.模型1如图11 a所示,我方无人机航线起点与敌方目标点分别为2,2 , 0.2 99,88,0.5 40,80,0 89,50,0
图11
图11
模型1仿真结果图
Fig.11
Simulation results of Model 1
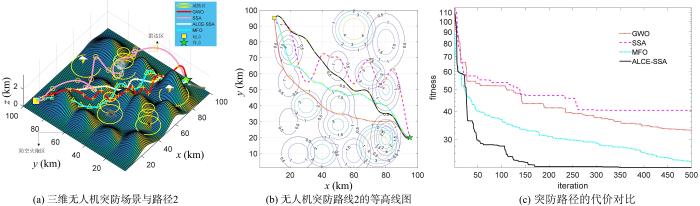
40,11,0 85,10,0 60,88,0 图11 c所示.模型2如图12 a所示,起点与目标点分别为10,95,0.2 95,20,0.5 30,40,0 70,60,0 40,11,0 75,15,0 60,88,0 图12 c所示.各算法种群数设为100,最大迭代次数500次.算法参数如表3 所示.
图12
图12
模型2仿真结果图
Fig.12
Simulation results of Model 2
图11 a由山脉、威胁源(黄色区域)、路径组成.通过本文算法ALCE⁃SSA与SSA[13 ] ,GWO[7 ] 和MFO[8 ] 在无人机突防路线轨迹图中的对比可以看出,GWO的规划路线(红线)普遍飞行高度高,没有避开威胁源;GWO的后期寻优能力差,导致路径点的某些维度误差较大;MFO(蓝线)中飞蛾更新机制使得全局寻优能力较强,三维路径图中的路径规划确实躲开了威胁源,找到了一条相对较优的路径,但是路径总体不够平滑,飞行难度大;SSA(粉线)规划的路径中飞行高度上下起伏,路径不够平滑;本文ALCE⁃SSA算法(白线)可以有效地避开威胁源,近似于沿着地图对角线生成一条较优的路径,较平滑,飞行难度降低,并且能实现低空飞行,完成低空突防目标.
从图11 b无人机突防场景与路径的等高线图可以看出,GWO,MFO,ALCE⁃SSA在规划路径转弯角方面较平滑,SSA规划的路径较曲折.
图11 c为突防路径的代价曲线,可见SSA的收敛速度比GWO,MFO的更新更快,但迭代30次左右便陷入局部最优;GWO在复杂度较高时收敛较慢,后期局部寻优能力差导致精度较差,代价收敛于35左右;MFO算法在路径搜索方面的全局寻优能力优秀,但搜索速度较慢,迭代500次左右寻找到一条较优的路径;本文算法兼具迭代速度快和全局寻优强的优点,迭代50次左右就可以寻找到一条较优路径,之后开始局部寻优,最终找到一条代价为25左右的路径.证明ALCE⁃SSA在无人机路径规划方面的效果更好.
图12 为模型2的仿真结果,验证模型1的结论.由图可见,模型1的SSA算法更新速度快但易陷入局部最优,GWO算法的后期寻优能力差导致某些路径点维度的精度差,MFO算法的全局寻优能力强但更新速度慢.由于路径规划不存在绝对最优解,但存在相对最优解,四种算法的轨迹相比,ALCE⁃SSA是符合条件的相对最优解.
搜索路径50次后对航程、转弯及俯仰角代价、最优代价取平均值,并统计搜索路径的成功率(判断路径是否穿过山脉和威胁区,成功率是50次实验中算法搜索路径成功的次数除以50)以及收敛时间.根据图11 c和图12 c的迭代曲线选择合适的收敛时间作为收敛代价.统计图11 中GWO迭代次数为400次的收敛时间;同理,MFO为500次,SSA为150次,ALCE⁃SSA为100次.图12 中GWO为500次,MFO为500次,SSA为250次,ALCE⁃SSA为175次.如表4 和表5 所示.
根据表4 的数据,ALCE⁃SSA规划的路径比SSA,MFO及GWO算法分别减短45.98,12.09和10.08 km,最优代价比其他三种算法分别降低17.99,0.91和9.91,时间代价比SSA,MFO及GWO减少34.46,94.79和70.64 s,并拥有98%的成功率.
根据表5 的数据,ALCE⁃SSA规划的路径比SSA,MFO及GWO算法分别减短67.28,17.16和36.43 km,最优代价比其他三种算法分别降低17.85,2.44和10.05,时间代价比SSA,MFO及GWO降低56.8,78.88和84.56 s,并拥有100%的成功率.
以上结果证明,ALCE⁃SSA算法的航程、转弯及俯仰角代价、最优代价、寻优成功率、时间代价等评价指标均优于其他三种算法.
对图11 模型搜索路径50次后航迹点的飞行高度取平均值,绘制各算法航迹的航程⁃高度图,如图13 所示.
图13
图13
飞行高度(a)和飞行高度与地形高度差(b)
Fig.13
Flight path altitude (a) and altitude difference (b)
一共选取16个航迹点,经三次样条插值后形成一条低空突防的路径.图13 显示了各个算法规划路径的各个航迹点的高度对比曲线,本文算法的高度曲线最低,然后是MFO,GWO,最后是SSA.从图中高度的变化也可看出,本文算法的爬升以及下滑角度的代价最小,GWO和SSA算法在各个航迹点的高度之间有巨大变化,对于无人机的性能有较大的要求.图13 b显示了各个航迹点的飞行高度与地形的高度差,主要体现低空突防的性能.可以看出,GWO和SSA的飞行高度差较大,变化较快,表现较差,而本文算法与MFO算法的高度差都有较好的表现.为进一步比较性能,求和各航迹点的高度与高度差,如表6 所示.
统计求和各航迹点的高度与高度差,对于高度和,ALCE⁃SSA规划路径的总高度和比SSA,MFO及GWO降低了21.14,6.64和17.34 km;高度差的和,ALCE⁃SSA规划路径时比SSA,MFO及GWO降低14.73,0.76和5.02 km.本文算法的高度差的和优于MFO,证明本文算法在低空突防的路径规划上有更优的表现.
5 结论
本文提出一种基于改进SSA算法来解决三维无人机低空突防问题.首先建立地形和威胁源模型,根据模型确定威胁代价;设计随机Tent映射初始化种群,提高初始化种群的质量;在发现者位置更新上采用自适应领头雀引导策略,解决鸟群发现者在更新位置上父代带来的不利影响;采用中心变异⁃进化因子提高种群多样性,防止种群陷入局部最优,提高全局搜索能力;采用最优个体样条插值随机取点法,使路径点均匀分布在地图上,解决路径点过于密集的问题.实验结果表明,ALCE⁃SSA可以更精确、快速地使无人机自主避开危险区域选择最优路径,实现低空突防.
参考文献
View Option
[1]
Zhang Z Wu J Dai J Y et al A novel real⁃time penetration path planning algorithm for stealth UAV in 3D complex dynamic environment
IEEE Access ,2020 (8 ):122757 -122771 .
[本文引用: 1]
[2]
Evdokimenkov V N Krasilshchikov M N Lyapin N A Guaranteeing UAV trajectory control when approaching a maneuvering air target
Journal of Computer and Systems Sciences International ,2018 ,57 (5 ):789 -800 .
[本文引用: 1]
[3]
郭一聪 ,刘小雄 ,章卫国 ,等 基于改进势场法的无人机三维路径规划方法
西北工业大学学报 ,2020 ,38 (5 ):977 -986 .
[本文引用: 1]
Guo Y C Liu X X Zhang W G et al 3D path planning method for UAV based on improved artificial potential field
Journal of Northwestern Polytechnical University ,2020 ,38 (5 ):977 -986 .
[本文引用: 1]
[4]
Mandloi D Arya R Verma A K Unmanned aerial vehicle path planning based on A* algorithm and its variants in 3d environment
International Journal of System Assurance Engineering and Management ,2021 ,12 (5 ):990 -1000 .
[本文引用: 1]
[5]
Cao Y Wei W Y Bai Y et al Multi⁃base multi⁃UAV cooperative reconnaissance path planning with genetic algorithm
Cluster Computing ,2019 ,22 (S3 ):5175 -5184 .
[本文引用: 1]
[6]
Liu X H Zhang D G Zhang J et al A path planning method based on the particle swarm optimization trained fuzzy neural network algorithm
Cluster Computing ,2021 ,24 (3 ):1901 -1915 .
[本文引用: 1]
[7]
Soundarya M S Anusha D K Rohith P et al Optimal path planning of UAV using grey wolf optimiser
International Journal of Computational Systems Engineering ,2019 ,5 (3 ):129 -136 .
[本文引用: 3]
[8]
黄鹤 ,吴琨 ,王会峰 ,等 基于改进飞蛾扑火算法的无人机低空突防路径规划
中国惯性技术学报 ,2021 ,29 (2 ):256 -263 .
[本文引用: 3]
Huang H Wu K Wang H et al Path planning of UAV low altitude penetration based on improved moth⁃flame optimization
Journal of Chinese Inertial Technology ,2021 ,29 (2 ):256 -263 .
[本文引用: 3]
[9]
Slowik A Kwasnicka H Nature inspired methods and their industry applications:Swarm intelligence algorithms
IEEE Transactions on Industrial Informatics ,2018 ,14 (3 ):1004 -1015 .
[本文引用: 1]
[10]
张宏宏 ,甘旭升 ,李双峰 ,等 复杂低空环境下考虑区域风险评估的无人机航路规划
仪器仪表学报 ,2021 ,42 (1 ):257 -266 .
[本文引用: 1]
Zhang H H Gan X S Li S F et al UAV route planning considering regional risk assessment under complex low altitude environment
Chinese Journal of Scientific Instrument ,2021 ,42 (1 ):257 -266 .
[本文引用: 1]
[11]
宋宇 ,王志明 面向无人机三维航迹规划的改进粒子群优化算法
传感器与微系统 ,2019 ,38 (3 ):144 -146 .
[本文引用: 1]
Song Y Wang Z M Improved PSO algorithm for UAV 3 D track planning
Transducer and Microsystem Technologies ,2019 ,38 (3 ):144 -146 .
[本文引用: 1]
[12]
许江波 ,刘琳岚 基于改进人工鱼群算法的无人机三维航迹规划
计算机工程与设计 ,2019 ,40 (2 ):540 -544 .
[本文引用: 1]
Xu J B Liu L L 3D trajectory planning for UAV based on improved artificial fish swarm algorithm
Computer Engineering and Design ,2019 ,40 (2 ):540 -544 .
[本文引用: 1]
[13]
Xue J K Shen B A novel swarm intelligence optimization approach:Sparrow search algorithm
Systems Science & Control Engineering ,2020 ,8 (1 ):22 -34 .
[本文引用: 4]
[14]
汤安迪 ,韩统 ,徐登武 ,等 基于混沌麻雀搜索算法的无人机航迹规划方法
计算机应用 ,2021 ,41 (7 ):2128 -2136 .
[本文引用: 1]
Tang A D Han T Xu D W et al Path planning method of unmanned aerial vehicle based on chaos sparrow search algorithm
Journal of Computer Applications ,2021 ,41 (7 ):2128 -2136 .
[本文引用: 1]
[15]
Yang C H Tsai M H Kang S C et al UAV path planning method for digital terrain model reconstruction:A debris fan example
Automation in Construction ,2018 (93 ):214 -230 .
[本文引用: 1]
[16]
Radmanesh M Kumar M Guentert P H et al Overview of path⁃planning and obstacle avoidance algorithms for UAVs:A comparative study
Unmanned Systems ,2018 ,6 (2 ):95 -118 .
[本文引用: 1]
[17]
Wahab S H A Chekima A Saad N et al Path planning of UAV based on fluid computing via accelerated method
International Journal of Engineering Trends and Technology ,2020 :76 -80 .
[本文引用: 1]
[18]
Chen X Hu C J Adaptive medical image encryption algorithm based on multiple chaotic mapping
Saudi Journal of Biological Sciences ,2017 ,24 (8 ):1821 -1827 .
[本文引用: 1]
[19]
Li Y C Han M X Guo Q L Modified whale optimization algorithm based on tent chaotic mapping and its application in structural optimization
KSCE Journal of Civil Engineering ,2020 ,24 (12 ):3703 -3713 .
[本文引用: 1]
A novel real?time penetration path planning algorithm for stealth UAV in 3D complex dynamic environment
1
2020
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
Guaranteeing UAV trajectory control when approaching a maneuvering air target
1
2018
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
基于改进势场法的无人机三维路径规划方法
1
2020
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
3D path planning method for UAV based on improved artificial potential field
1
2020
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
Unmanned aerial vehicle path planning based on A* algorithm and its variants in 3d environment
1
2021
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
Multi?base multi?UAV cooperative reconnaissance path planning with genetic algorithm
1
2019
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
A path planning method based on the particle swarm optimization trained fuzzy neural network algorithm
1
2021
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
Optimal path planning of UAV using grey wolf optimiser
3
2019
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
... 为了验证改进算法的性能,将本文算法与SSA[13 ] ,GWO[7 ] ,MFO[8 ] 进行比较,测试函数如 ...
... 图11 a由山脉、威胁源(黄色区域)、路径组成.通过本文算法ALCE⁃SSA与SSA[13 ] ,GWO[7 ] 和MFO[8 ] 在无人机突防路线轨迹图中的对比可以看出,GWO的规划路线(红线)普遍飞行高度高,没有避开威胁源;GWO的后期寻优能力差,导致路径点的某些维度误差较大;MFO(蓝线)中飞蛾更新机制使得全局寻优能力较强,三维路径图中的路径规划确实躲开了威胁源,找到了一条相对较优的路径,但是路径总体不够平滑,飞行难度大;SSA(粉线)规划的路径中飞行高度上下起伏,路径不够平滑;本文ALCE⁃SSA算法(白线)可以有效地避开威胁源,近似于沿着地图对角线生成一条较优的路径,较平滑,飞行难度降低,并且能实现低空飞行,完成低空突防目标. ...
基于改进飞蛾扑火算法的无人机低空突防路径规划
3
2021
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
... 为了验证改进算法的性能,将本文算法与SSA[13 ] ,GWO[7 ] ,MFO[8 ] 进行比较,测试函数如 ...
... 图11 a由山脉、威胁源(黄色区域)、路径组成.通过本文算法ALCE⁃SSA与SSA[13 ] ,GWO[7 ] 和MFO[8 ] 在无人机突防路线轨迹图中的对比可以看出,GWO的规划路线(红线)普遍飞行高度高,没有避开威胁源;GWO的后期寻优能力差,导致路径点的某些维度误差较大;MFO(蓝线)中飞蛾更新机制使得全局寻优能力较强,三维路径图中的路径规划确实躲开了威胁源,找到了一条相对较优的路径,但是路径总体不够平滑,飞行难度大;SSA(粉线)规划的路径中飞行高度上下起伏,路径不够平滑;本文ALCE⁃SSA算法(白线)可以有效地避开威胁源,近似于沿着地图对角线生成一条较优的路径,较平滑,飞行难度降低,并且能实现低空飞行,完成低空突防目标. ...
Path planning of UAV low altitude penetration based on improved moth?flame optimization
3
2021
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
... 为了验证改进算法的性能,将本文算法与SSA[13 ] ,GWO[7 ] ,MFO[8 ] 进行比较,测试函数如 ...
... 图11 a由山脉、威胁源(黄色区域)、路径组成.通过本文算法ALCE⁃SSA与SSA[13 ] ,GWO[7 ] 和MFO[8 ] 在无人机突防路线轨迹图中的对比可以看出,GWO的规划路线(红线)普遍飞行高度高,没有避开威胁源;GWO的后期寻优能力差,导致路径点的某些维度误差较大;MFO(蓝线)中飞蛾更新机制使得全局寻优能力较强,三维路径图中的路径规划确实躲开了威胁源,找到了一条相对较优的路径,但是路径总体不够平滑,飞行难度大;SSA(粉线)规划的路径中飞行高度上下起伏,路径不够平滑;本文ALCE⁃SSA算法(白线)可以有效地避开威胁源,近似于沿着地图对角线生成一条较优的路径,较平滑,飞行难度降低,并且能实现低空飞行,完成低空突防目标. ...
Nature inspired methods and their industry applications:Swarm intelligence algorithms
1
2018
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
复杂低空环境下考虑区域风险评估的无人机航路规划
1
2021
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
UAV route planning considering regional risk assessment under complex low altitude environment
1
2021
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
面向无人机三维航迹规划的改进粒子群优化算法
1
2019
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
Improved PSO algorithm for UAV 3 D track planning
1
2019
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
基于改进人工鱼群算法的无人机三维航迹规划
1
2019
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
3D trajectory planning for UAV based on improved artificial fish swarm algorithm
1
2019
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
A novel swarm intelligence optimization approach:Sparrow search algorithm
4
2020
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
... 麻雀是一种聪明、记忆力较好的鸟类,喜欢群居活动.SSA[13 ] 中的麻雀种群分为觅食发现者和抢食物的加入者,两者角色可以互换;同时,还选择了一定比例的麻雀作为侦察的警戒者,一有危险便飞向别处.整个麻雀种群的位置矩阵以及适应度表示如下: ...
... 为了验证改进算法的性能,将本文算法与SSA[13 ] ,GWO[7 ] ,MFO[8 ] 进行比较,测试函数如 ...
... 图11 a由山脉、威胁源(黄色区域)、路径组成.通过本文算法ALCE⁃SSA与SSA[13 ] ,GWO[7 ] 和MFO[8 ] 在无人机突防路线轨迹图中的对比可以看出,GWO的规划路线(红线)普遍飞行高度高,没有避开威胁源;GWO的后期寻优能力差,导致路径点的某些维度误差较大;MFO(蓝线)中飞蛾更新机制使得全局寻优能力较强,三维路径图中的路径规划确实躲开了威胁源,找到了一条相对较优的路径,但是路径总体不够平滑,飞行难度大;SSA(粉线)规划的路径中飞行高度上下起伏,路径不够平滑;本文ALCE⁃SSA算法(白线)可以有效地避开威胁源,近似于沿着地图对角线生成一条较优的路径,较平滑,飞行难度降低,并且能实现低空飞行,完成低空突防目标. ...
基于混沌麻雀搜索算法的无人机航迹规划方法
1
2021
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
Path planning method of unmanned aerial vehicle based on chaos sparrow search algorithm
1
2021
... 低空突防是无人机作战中的重要环节[1 -2 ] ,也是目前的研究热点.为了找出一条从起点到终点的可以避开威胁源的安全路径,突防目标以有效的规划路线方法为基础,在约束问题下找出最优解,其关键在于寻优算法的优劣.近年来学者们展开深入研究,提出了多种低空突防路径规划算法,主要分为两大类:(1)常规算法,如人工势场法[3 ] 、A*算法[4 ] 等;(2)智能算法,如遗传算法(Genetic Algorithms,GA)[5 ] 、粒子群算法(Particle Swarm Optimization,PSO)[6 ] 、灰狼算法(Grey Wolf Optimization,GWO)[7 ] 、飞蛾扑火算法(Moth⁃Flame Optimization,MFO)[8 ] 等.和常规算法相比,智能算法收敛速度快,鲁棒性强[9 ] ,而采用群体智能优化算法求解无人机突防路径的问题更是目前的研究热点.张宏宏等[10 ] 为了解决无人机低空突防的问题,利用改进蚁群算法生成一条风险较低的路径,提升了寻优效率,但路径精确度不高.宋宇和王志明[11 ] 提出一种基于三维规划的改进粒子群优化方法,提升了搜索性能,但威胁场考虑得比较简单,也没有考虑地形等因素,实际应用效果不理想.许江波和刘琳岚[12 ] 通过自适应策略改进鱼群算法,利用其全局寻优能力解决路径规划问题,但搜索时间过长.以上研究虽然实现了无人机的航迹规划,但路径规划效果和迭代收敛速度仍有进一步改进空间.麻雀搜索算法(Sparrow Search Algorithm,SSA)是2020年由Xue and Shen[13 ] 提出的一种新的群智能优化算法,模拟麻雀觅食的过程,具有收敛速度快、适应性强、模型易修改等特点,适用于无人机路径规划.汤安迪等[14 ] 提出一种基于混沌麻雀搜索算法的航迹规划法,能够快速地得到一条安全的可行航迹,但该算法仅仅针对二维场景的应用,存在一定的局限性.SSA本身还存在易陷入局部最优、种群多样性快速减少等问题,需要进一步改进. ...
UAV path planning method for digital terrain model reconstruction:A debris fan example
1
2018
... 将无人机的突防环境[15 -16 ] 分为平原和山地两种地形,其中山峰影响最大.三维环境下的山峰建模如下: ...
Overview of path?planning and obstacle avoidance algorithms for UAVs:A comparative study
1
2018
... 将无人机的突防环境[15 -16 ] 分为平原和山地两种地形,其中山峰影响最大.三维环境下的山峰建模如下: ...
Path planning of UAV based on fluid computing via accelerated method
1
2020
... 雷达探测、防空火炮、地空导弹等是无人机突防的主要威胁来源.地形中的威胁源建模原理是根据威胁的性质计算威胁的作用半径和作用空间形状,以等效地形来代替[17 ] .具体建模如下: ...
Adaptive medical image encryption algorithm based on multiple chaotic mapping
1
2017
... 由于SSA的初始种群是随机产生的,可能会导致种群多样性不足,对迭代影响很大,采用混沌映射[18 -19 ] 对于初始化质量有不错的效果.本文采用Tent映射来提高初始种群质量,y,z 维度取值变化曲线如图1 所示. ...
Modified whale optimization algorithm based on tent chaotic mapping and its application in structural optimization
1
2020
... 由于SSA的初始种群是随机产生的,可能会导致种群多样性不足,对迭代影响很大,采用混沌映射[18 -19 ] 对于初始化质量有不错的效果.本文采用Tent映射来提高初始种群质量,y,z 维度取值变化曲线如图1 所示. ...










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}