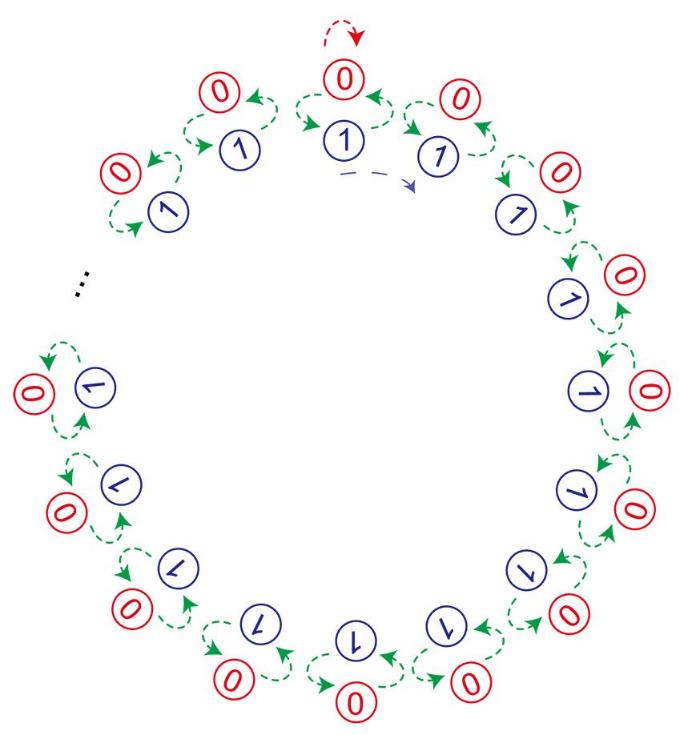
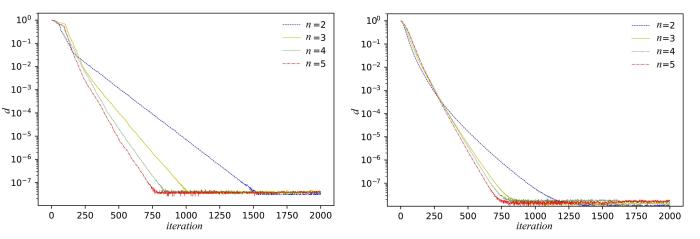
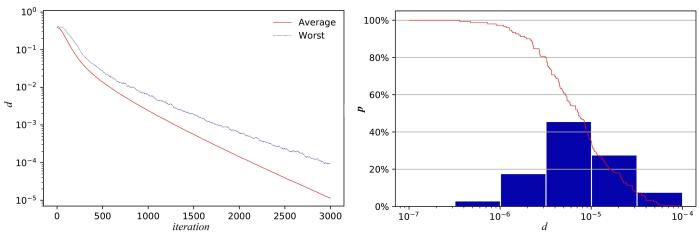
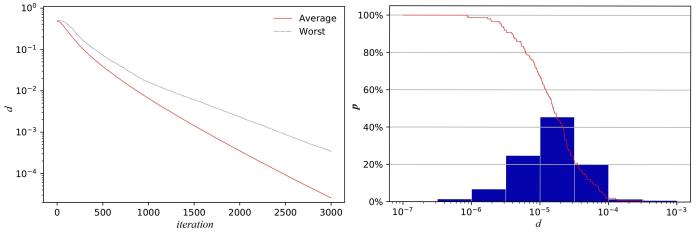
Finding implementations of unitary operations is a fundamental task in the field of quantum computation. This letter mainly investigates the ability of the discrete time quantum walk on a cycle for this task. First,we introduce a special discrete time quantum walk on a cycle model,and then discuss the effectiveness and feasibility of the model in achieving arbitrary unitary quantum operations. For two qubits system,the empirical solutions of the universal quantum gate set and quantum fourier transform are presented. Due to the difficulty of exactly giving the empirical solutions in high⁃dimensional cases,we would introduce the stochastic gradient descent algorithm which is commonly used in machine learning to find approximations to arbitrary desired unitary operations. Then,we would manage to modify the stochastic gradient descent algorithm in order to realize arbitrary unitary quantum operations and 2⁃outcome POVMs on the position space effeciently. In high⁃dimensional cases,it means one can control a large system via the discrete time quantum walk on a cycle indirectly on the basis of controlling the 2⁃level coin system. The completion of these tasks shows that we can achieve dynamic control of full discrete time quantum walk on a cycle based on the stochastic gradient descent algorithm.
Keywords:quantum walk on a cycle
;
stochastic gradient descent algorithm
;
unitary operations
;
POVM
;
dynamic control
Shao Yuhao, Lin Jiayi, Wu Shengjun. Dynamic control of full quantum walk on a cycle based on stochastic gradient descent algorithm. Journal of nanjing University[J], 2022, 58(2): 219-227 doi:10.13232/j.cnki.jnju.2022.02.005
早在1993年,Aharonov et al[1]首先引入了量子游走的概念作为经典随机游走在量子领域的推广.他们发现,由于量子的相干性,量子游走的扩散速度比经典随机游走的扩散速度更快.此后,根据量子游走的概念,逐渐开发出很多新的量子算法[2].量子游走也开始被用来实现量子模拟[3-7]和通用的量子计算[8-10].截至目前,量子游走已经在许多不同物理系统中实现和应用[11].
NielsenM A, ChuangI. Quantum Computation and Quantum Information:The 10th Anniversary Edition. Cambridge,United Kingdom:Cambridge University Press,2011.
... 早在1993年,Aharonov et al[1]首先引入了量子游走的概念作为经典随机游走在量子领域的推广.他们发现,由于量子的相干性,量子游走的扩散速度比经典随机游走的扩散速度更快.此后,根据量子游走的概念,逐渐开发出很多新的量子算法[2].量子游走也开始被用来实现量子模拟[3-7]和通用的量子计算[8-10].截至目前,量子游走已经在许多不同物理系统中实现和应用[11]. ...
Quantum random walks:An introductory overview
1
2003
... 早在1993年,Aharonov et al[1]首先引入了量子游走的概念作为经典随机游走在量子领域的推广.他们发现,由于量子的相干性,量子游走的扩散速度比经典随机游走的扩散速度更快.此后,根据量子游走的概念,逐渐开发出很多新的量子算法[2].量子游走也开始被用来实现量子模拟[3-7]和通用的量子计算[8-10].截至目前,量子游走已经在许多不同物理系统中实现和应用[11]. ...
Exploring topological phases with quantum walks
1
2010
... 早在1993年,Aharonov et al[1]首先引入了量子游走的概念作为经典随机游走在量子领域的推广.他们发现,由于量子的相干性,量子游走的扩散速度比经典随机游走的扩散速度更快.此后,根据量子游走的概念,逐渐开发出很多新的量子算法[2].量子游走也开始被用来实现量子模拟[3-7]和通用的量子计算[8-10].截至目前,量子游走已经在许多不同物理系统中实现和应用[11]. ...
Observation of quasiperiodic dynamics in a one?dimensional quantum walk of single photons in space
0
2014
Anderson localization of entangled photons in an integrated quantum walk
0
2013
Decoherence in two?dimensional quantum walks
0
2006
Localization of quantum walks induced by recurrence properties of random walks
1
2013
... 早在1993年,Aharonov et al[1]首先引入了量子游走的概念作为经典随机游走在量子领域的推广.他们发现,由于量子的相干性,量子游走的扩散速度比经典随机游走的扩散速度更快.此后,根据量子游走的概念,逐渐开发出很多新的量子算法[2].量子游走也开始被用来实现量子模拟[3-7]和通用的量子计算[8-10].截至目前,量子游走已经在许多不同物理系统中实现和应用[11]. ...
Universal Computation by quantum walk
2
2009
... 早在1993年,Aharonov et al[1]首先引入了量子游走的概念作为经典随机游走在量子领域的推广.他们发现,由于量子的相干性,量子游走的扩散速度比经典随机游走的扩散速度更快.此后,根据量子游走的概念,逐渐开发出很多新的量子算法[2].量子游走也开始被用来实现量子模拟[3-7]和通用的量子计算[8-10].截至目前,量子游走已经在许多不同物理系统中实现和应用[11]. ...
Universal computation by multiparticle quantum walk
0
2013
Universal quantum computation using the discrete?time quantum walk
2
2010
... 早在1993年,Aharonov et al[1]首先引入了量子游走的概念作为经典随机游走在量子领域的推广.他们发现,由于量子的相干性,量子游走的扩散速度比经典随机游走的扩散速度更快.此后,根据量子游走的概念,逐渐开发出很多新的量子算法[2].量子游走也开始被用来实现量子模拟[3-7]和通用的量子计算[8-10].截至目前,量子游走已经在许多不同物理系统中实现和应用[11]. ...
... 早在1993年,Aharonov et al[1]首先引入了量子游走的概念作为经典随机游走在量子领域的推广.他们发现,由于量子的相干性,量子游走的扩散速度比经典随机游走的扩散速度更快.此后,根据量子游走的概念,逐渐开发出很多新的量子算法[2].量子游走也开始被用来实现量子模拟[3-7]和通用的量子计算[8-10].截至目前,量子游走已经在许多不同物理系统中实现和应用[11]. ...
Learning rate schedules for faster stochastic gradient search




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}