基于随机梯度下降算法实现对环上量子游走的动态完全控制
Dynamic control of full quantum walk on a cycle based on stochastic gradient descent algorithm
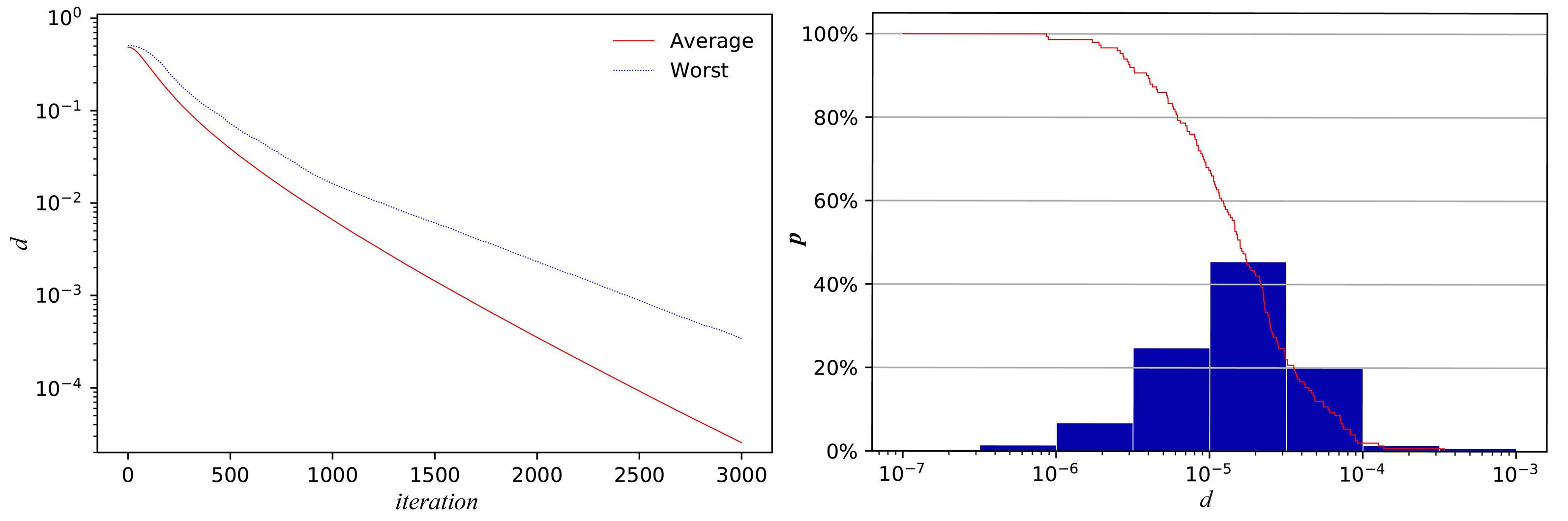
左图,横轴和纵轴分别对应于更新次数和距离.绘制的每条线都是平行取样训练的多个样本在同一更新次数下,距离(所需实现的量子操作
基于随机梯度下降算法实现对环上量子游走的动态完全控制 |
| 邵玉豪, 林嘉懿, 吴盛俊 |
|
Dynamic control of full quantum walk on a cycle based on stochastic gradient descent algorithm |
| Yuhao Shao, Jiayi Lin, Shengjun Wu |
| 图5 利用随机梯度下降算法可以在位置空间实现任意两结果半正定算子测量 左图,横轴和纵轴分别对应于更新次数和距离.绘制的每条线都是平行取样训练的多个样本在同一更新次数下,距离(所需实现的量子操作 |
| Fig.5 Using stochastic gradient descent algorithm can realize arbitrary 2?outcome POVMs |
|
|