三维装配补全是一项重要的交互式装配任务,对于一个半成品装配体,机器人需要明确其缺失部件,从候选部件中挑选正确部件,计算准确的拼装位姿,最后将半成品补全.稳定性是椅子、桌子等实际装配体设计的首要原则,也是三维装配补全的重要目标,现有的装配补全工作多根据部件的几何关系来优化装配补全过程,没有考虑补全后装配体的稳定性,导致补全结果的正确率不高,难以满足机器人实际装配的需求.针对上述问题,提出一种基于稳定性优化的三维装配补全方法(Finishing the Incomplete 3D Assembly with Transformer,StableFiT),定义了一种装配体稳定性验证方法.基于NVIDIA Isaac Sim仿真平台训练了一个装配体稳定性判别器,并基于稳定性判别器提供的稳定性反馈,优化了三维装配体的补全.在PartNet数据集上开展实验验证,结果表明StableFiT能够有效提升补全的装配体的正确性和稳定性.
关键词:自动装配
;
三维装配补全
;
稳定性验证
;
稳定性优化
Abstract
3D assembly completion is an essential and complex interactive assembly task. The robot must identify the true missing parts,select the correct parts from a toolkit of candidates,calculate precise assembly poses,and ultimately make the incomplete assembly complete. As the primary principle in the design of actual assemblies such as chairs and tables,stability is also an ultimate goal of 3D assembly completion. Existing works of 3D assembly completion primarily focus on geometric relationship modeling of parts,without taking into account the stability of assembly,leading to low accuracy in completion and making it a challenge to meet the actual requirements of robot assembly. To tackle this issue,we propose StableFiT(Finishing the Incomplete 3D Assembly with Transformer) for 3D assembly completion with stability optimization. We introduce a novel stability verification method for the completed assembly. By training an assembly stability discriminator using the verification results obtained from the NVIDIA Isaac Sim simulation platform,we furtherly optimize 3D assembly completion based on stability feedback from the stability discriminator. Experimental results on the PartNet dataset demonstrate that StableFiT effectively improves the correctness and stability of the completed assemblies,addressing the limitations of existing assembly completion methods.
Yao Qihao, Wang Weihao, You Mingyu. 3D assembly completion with stability optimization. Journal of nanjing University[J], 2023, 59(5): 742-751 doi:10.13232/j.cnki.jnju.2023.05.002
针对上述问题,本文提出一种基于稳定性优化的三维装配补全方法StableFiT(Finishing the Incomplete 3D Assembly with Transformer),指导补全出稳定性和实用性更高的装配体.
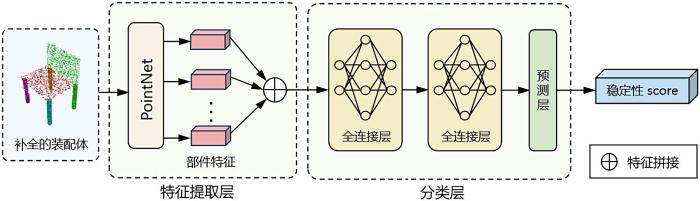
该方法的主要贡献:(1)定义了一种衡量装配体稳定性的方法,并基于NVIDIA Isaac Sim仿真平台实现了该方法;(2)提出一种点云格式下的装配体稳定性判别器模型,实现了点云格式下装配体的稳定性分类;(3)将提出的判别器模型引入三维装配补全模型,实现了三维装配补全的定量稳定性优化,并在定性和定量实验中取得了优异的表现.
1 三维装配补全相关工作
三维部件装配是一项典型的装配任务,其目标是将一组给定的部件从头组装成完整的装配体[3-5],目前对三维部件装配的研究工作较为广泛.Zhan et al[2]首次正式定义三维部件装配问题,提出开创意义的DGL (Dynamic Graph Learning)框架,基于动态图神经网络对部件之间的几何关系进行建模,预测每个部件的位姿.Harish et al[6]提出RGL⁃NET (Recurrent Graph Learning),利用递归图学习范式来逐步细化部件之间的关系,能获得更准确的姿态预测.Wu et al[7]提出一个基于部件的端到端生成式框架PQ⁃Net,通过三维重建对各个部件重新进行建模.Li et al[8]提出PageNet,同样采用生成式的框架,整个框架由一个基于VAEGANs[9-10]的部件生成器和一个部件组装器组成,能实现两阶段的三维部件组装.其他相关工作利用其他模态的信息来源作为输入,如Li et al[11]使用图像作为输入.最新的关于三维部件装配的研究在问题设置上作出一定调整,如Wu et al[12]按照语义信息划分不同的部件组,Xu et al[13]将任务目标转为无监督合成新的装配体.但上述工作均以装配体的部件全集作为输入来预测部件的6自由度位姿,三维装配补全在此基础上被提出,两者在任务设置上存在一定差异.
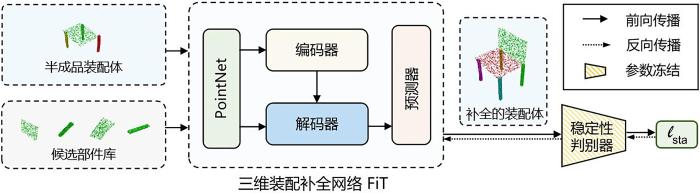
三维装配补全旨在根据给定的半成品装配体,从一系列候选部件组成的工具包中挑选合适的部件并以正确的位姿拼装,最终将半成品补装完整.Wang et al[14]首次提出并定义三维装配补全这一新任务,设计了一个基于Transformer的框架FiT (Finishing the Incomplete 3D Assembly with Transformer),通过注意力机制对候选部件与半成品部件之间的几何关系进行建模,发掘半成品真正缺失的部件并预测其位姿,完成装配补全.目前,有关三维装配补全的研究仍在初步阶段.
三维点云补全是相近的一项任务,不同于“拼装式”补全,三维点云补全直接对点云数据中的缺失部分进行“生成式”预测和恢复,通常采用带有编码器⁃解码器框架的生成式解决方案,如Tchapmi et al[15]的TopNet,Yuan et al[16]的PCN (Point Completion Network)和Wen et al[17]的SA⁃Net (Skip⁃Attention Network).还有一些方法采用对抗学习的框架来提高点云补全的真实性和一致性,如Sarmad et al[18]的 RL⁃GAN⁃Net (Reinforcement Learning Agent Controlled GAN Network)和Hu et al[19]的Render4Completion.最近的一些工作将Transformer[20]引入三维形状补全来对点云分布进行全局建模,如Yan et al[21]的ShapeFormer和Mittal et al[22]的AutoSDF都引入了PQ⁃VAE[23-24],在离散空间中学习三维表征并用Transformer来回归补全缺失区域,Wen et al[25]的PMP⁃Net++和Li et al[26]的ProxyFormer同样使用Transformer进行三维点云补全.总体地,三维装配补全侧重于部件级别的补全,每个部件都是一组具有特定几何和语义信息的点云,而三维点云补全则侧重由于遮挡等造成的缺失补全.
上述装配工作仅关注部件的几何关系,没有考虑装配体的稳定性,这一方面会影响三维装配补全的准确性,另一方面也不利于将三维装配补全真正应用于实际.本文在Wang et al[14]的基础上,设计了一种稳定性的验证方式与评价指标,并将稳定性约束引入三维装配补全框架,进一步提升补全的装配体的正确性和稳定性.
2 基于NVIDIA Isaac Sim仿真平台的装配体稳定性验证方法
针对上述装配体稳定性的问题,本文创造性地提出一种基于NVIDIA Isaac Sim仿真平台的装配体稳定性验证方法,如图2所示.首先对数据进行从点云到USD的格式转换,然后将其导入NVIDIA Isaac Sim仿真平台;在物理仿真过程中,仿真环境会实时记录装配体的状态;仿真结束后,系统会根据本文制定的稳定性判断规则来计算装配体的稳定性指标,验证经过三维补全的装配体的稳定性.
NVIDIA Isaac Sim是NVIDIA Omniverse平台推出的一款机器人模拟工具包,Isaac Sim具有构建虚拟机器人世界和实验的基本功能,为研究和从业人员提供所需的工具和工作流程来创建稳定的、物理上精确的仿真环境及合成数据集.
基于NVIDIA Isaac Sim仿真平台,本文搭建了一个非常接近现实场景且物理精确的仿真环境来对装配体进行稳定性检验,其具体流程可以参考图2,首先添加一个具有物理属性的水平面来承载待检测的装配体,然后导入装配体.由于仿真平台只支持USD格式文件的导入,所以需要先将点云格式的装配体转换成USD格式.导入装配体后,将其静止放置在水平面上并为其赋予物理属性.为了使提出的稳定性检验方法具有普适性,将所有装配体统一设置为质量,且均由相同材料制成.准备工作完成后,按下Isaac Sim操作界面的仿真按钮,平台内置的物理引擎将自动对物理现象进行实时的精确的模拟,同时,Isaac Sim界面的显示面板也将实时显示装配体的位置坐标及其沿各个方向的速度,方便用户实时掌握装配体的状态.记仿真开始的时刻为0,在T时刻仿真自动结束.最终,仿真环境根据2.1中定义的稳定性量化指标对装配体的稳定性进行评估,并将结果返回给用户.
利用4.1所述数据对基准模型FiT[14]进行训练,训练轮次分别为20,40,80,160,320和最佳轮次的模型补全的装配体,将其如2.2所述输入NVIDIA Isaac Sim仿真环境中进行稳定性验证,得到带有稳定性标签的半成品装配体数据集.对该数据集进行一定的处理,将其中稳定装配体与不稳定装配体的比例调整至7∶3,再利用处理后的数据集训练2.3提出的稳定性判别器模型.训练过程中,设置初始学习率为0.001,batch size为64,训练轮次为200.对于椅子和桌子数据集分别按上述步骤训练得到对应的稳定性判别器模型,最终得到的椅子稳定性判别器模型的分类准确率可达80%,桌子稳定性判别器模型的分类准确率可达76%.
以上是单部件缺失时的实验方法,对于多部件缺失的情况,处理步骤与上述基本一致,只是训练数据集的构建稍有不同.这里选择训练轮次为40,80,160和最佳轮次的模型补全的装配体进行NVIDIA Isaac Sim仿真环境下的稳定性验证,得到带有稳定性标签的半成品装配体数据集,后续对于稳定性判别器模型训练参数的设置与上述一致.最终训练得到的椅子稳定性判别器模型的分类准确率可达84%,桌子稳定性判别器模型的分类准确率可达77%.
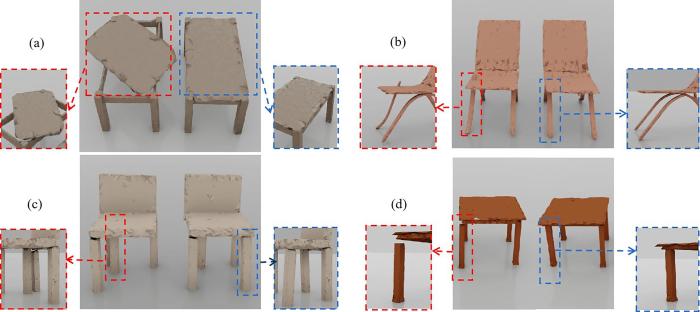
为了直观说明StableFiT对装配体稳定性提升的效果,将StableFiT与基准模型FiT补全的装配体在NVIDIA Isaac Sim仿真平台上进行验证,图5展示了引入稳定性优化前后FiT模型补全的部分装配体的对比情况.图5a和图5b是单部件缺失时两种方法补全的装配体,图5c和图5d是多部件缺失时两种方法补全的装配体.每幅子图中左侧的装配体是由基准模型FiT补全得到的,右侧的装配体是利用StableFiT补全得到的.图中还通过放大局部细节来更好地对比展示装配体的稳定性情况,红色框展示的是装配体不稳定的细节,蓝色框展示引入稳定性优化后的改进情况.
State Administration of Market Supervision and Administration of the People's Republic of China,Standardization Administration of the People's Republic of China.
Office furniture:Tables and desks
Test methods for the determination of stability,strength and durability. GB/T 38607⁃2020.
... 三维部件装配是一项典型的装配任务,其目标是将一组给定的部件从头组装成完整的装配体[3-5],目前对三维部件装配的研究工作较为广泛.Zhan et al[2]首次正式定义三维部件装配问题,提出开创意义的DGL (Dynamic Graph Learning)框架,基于动态图神经网络对部件之间的几何关系进行建模,预测每个部件的位姿.Harish et al[6]提出RGL⁃NET (Recurrent Graph Learning),利用递归图学习范式来逐步细化部件之间的关系,能获得更准确的姿态预测.Wu et al[7]提出一个基于部件的端到端生成式框架PQ⁃Net,通过三维重建对各个部件重新进行建模.Li et al[8]提出PageNet,同样采用生成式的框架,整个框架由一个基于VAEGANs[9-10]的部件生成器和一个部件组装器组成,能实现两阶段的三维部件组装.其他相关工作利用其他模态的信息来源作为输入,如Li et al[11]使用图像作为输入.最新的关于三维部件装配的研究在问题设置上作出一定调整,如Wu et al[12]按照语义信息划分不同的部件组,Xu et al[13]将任务目标转为无监督合成新的装配体.但上述工作均以装配体的部件全集作为输入来预测部件的6自由度位姿,三维装配补全在此基础上被提出,两者在任务设置上存在一定差异. ...
Probabilistic reasoning for assembly?based 3D modeling
1
2011
... 三维部件装配是一项典型的装配任务,其目标是将一组给定的部件从头组装成完整的装配体[3-5],目前对三维部件装配的研究工作较为广泛.Zhan et al[2]首次正式定义三维部件装配问题,提出开创意义的DGL (Dynamic Graph Learning)框架,基于动态图神经网络对部件之间的几何关系进行建模,预测每个部件的位姿.Harish et al[6]提出RGL⁃NET (Recurrent Graph Learning),利用递归图学习范式来逐步细化部件之间的关系,能获得更准确的姿态预测.Wu et al[7]提出一个基于部件的端到端生成式框架PQ⁃Net,通过三维重建对各个部件重新进行建模.Li et al[8]提出PageNet,同样采用生成式的框架,整个框架由一个基于VAEGANs[9-10]的部件生成器和一个部件组装器组成,能实现两阶段的三维部件组装.其他相关工作利用其他模态的信息来源作为输入,如Li et al[11]使用图像作为输入.最新的关于三维部件装配的研究在问题设置上作出一定调整,如Wu et al[12]按照语义信息划分不同的部件组,Xu et al[13]将任务目标转为无监督合成新的装配体.但上述工作均以装配体的部件全集作为输入来预测部件的6自由度位姿,三维装配补全在此基础上被提出,两者在任务设置上存在一定差异. ...
Assembly?based conceptual 3D modeling with unlabeled components using probabilistic factor graph
0
2016
A probabilistic model for component?based shape synthesis
1
2012
... 三维部件装配是一项典型的装配任务,其目标是将一组给定的部件从头组装成完整的装配体[3-5],目前对三维部件装配的研究工作较为广泛.Zhan et al[2]首次正式定义三维部件装配问题,提出开创意义的DGL (Dynamic Graph Learning)框架,基于动态图神经网络对部件之间的几何关系进行建模,预测每个部件的位姿.Harish et al[6]提出RGL⁃NET (Recurrent Graph Learning),利用递归图学习范式来逐步细化部件之间的关系,能获得更准确的姿态预测.Wu et al[7]提出一个基于部件的端到端生成式框架PQ⁃Net,通过三维重建对各个部件重新进行建模.Li et al[8]提出PageNet,同样采用生成式的框架,整个框架由一个基于VAEGANs[9-10]的部件生成器和一个部件组装器组成,能实现两阶段的三维部件组装.其他相关工作利用其他模态的信息来源作为输入,如Li et al[11]使用图像作为输入.最新的关于三维部件装配的研究在问题设置上作出一定调整,如Wu et al[12]按照语义信息划分不同的部件组,Xu et al[13]将任务目标转为无监督合成新的装配体.但上述工作均以装配体的部件全集作为输入来预测部件的6自由度位姿,三维装配补全在此基础上被提出,两者在任务设置上存在一定差异. ...
RGL?NET:A recurrent graph learning framework for progressive part assembly
1
2022
... 三维部件装配是一项典型的装配任务,其目标是将一组给定的部件从头组装成完整的装配体[3-5],目前对三维部件装配的研究工作较为广泛.Zhan et al[2]首次正式定义三维部件装配问题,提出开创意义的DGL (Dynamic Graph Learning)框架,基于动态图神经网络对部件之间的几何关系进行建模,预测每个部件的位姿.Harish et al[6]提出RGL⁃NET (Recurrent Graph Learning),利用递归图学习范式来逐步细化部件之间的关系,能获得更准确的姿态预测.Wu et al[7]提出一个基于部件的端到端生成式框架PQ⁃Net,通过三维重建对各个部件重新进行建模.Li et al[8]提出PageNet,同样采用生成式的框架,整个框架由一个基于VAEGANs[9-10]的部件生成器和一个部件组装器组成,能实现两阶段的三维部件组装.其他相关工作利用其他模态的信息来源作为输入,如Li et al[11]使用图像作为输入.最新的关于三维部件装配的研究在问题设置上作出一定调整,如Wu et al[12]按照语义信息划分不同的部件组,Xu et al[13]将任务目标转为无监督合成新的装配体.但上述工作均以装配体的部件全集作为输入来预测部件的6自由度位姿,三维装配补全在此基础上被提出,两者在任务设置上存在一定差异. ...
PQ?NET:A generative part Seq2Seq network for 3D shapes
1
2020
... 三维部件装配是一项典型的装配任务,其目标是将一组给定的部件从头组装成完整的装配体[3-5],目前对三维部件装配的研究工作较为广泛.Zhan et al[2]首次正式定义三维部件装配问题,提出开创意义的DGL (Dynamic Graph Learning)框架,基于动态图神经网络对部件之间的几何关系进行建模,预测每个部件的位姿.Harish et al[6]提出RGL⁃NET (Recurrent Graph Learning),利用递归图学习范式来逐步细化部件之间的关系,能获得更准确的姿态预测.Wu et al[7]提出一个基于部件的端到端生成式框架PQ⁃Net,通过三维重建对各个部件重新进行建模.Li et al[8]提出PageNet,同样采用生成式的框架,整个框架由一个基于VAEGANs[9-10]的部件生成器和一个部件组装器组成,能实现两阶段的三维部件组装.其他相关工作利用其他模态的信息来源作为输入,如Li et al[11]使用图像作为输入.最新的关于三维部件装配的研究在问题设置上作出一定调整,如Wu et al[12]按照语义信息划分不同的部件组,Xu et al[13]将任务目标转为无监督合成新的装配体.但上述工作均以装配体的部件全集作为输入来预测部件的6自由度位姿,三维装配补全在此基础上被提出,两者在任务设置上存在一定差异. ...
Learning part generation and assembly for structure?aware shape synthesis
1
2020
... 三维部件装配是一项典型的装配任务,其目标是将一组给定的部件从头组装成完整的装配体[3-5],目前对三维部件装配的研究工作较为广泛.Zhan et al[2]首次正式定义三维部件装配问题,提出开创意义的DGL (Dynamic Graph Learning)框架,基于动态图神经网络对部件之间的几何关系进行建模,预测每个部件的位姿.Harish et al[6]提出RGL⁃NET (Recurrent Graph Learning),利用递归图学习范式来逐步细化部件之间的关系,能获得更准确的姿态预测.Wu et al[7]提出一个基于部件的端到端生成式框架PQ⁃Net,通过三维重建对各个部件重新进行建模.Li et al[8]提出PageNet,同样采用生成式的框架,整个框架由一个基于VAEGANs[9-10]的部件生成器和一个部件组装器组成,能实现两阶段的三维部件组装.其他相关工作利用其他模态的信息来源作为输入,如Li et al[11]使用图像作为输入.最新的关于三维部件装配的研究在问题设置上作出一定调整,如Wu et al[12]按照语义信息划分不同的部件组,Xu et al[13]将任务目标转为无监督合成新的装配体.但上述工作均以装配体的部件全集作为输入来预测部件的6自由度位姿,三维装配补全在此基础上被提出,两者在任务设置上存在一定差异. ...
Improved training of wasserstein GANs
1
2017
... 三维部件装配是一项典型的装配任务,其目标是将一组给定的部件从头组装成完整的装配体[3-5],目前对三维部件装配的研究工作较为广泛.Zhan et al[2]首次正式定义三维部件装配问题,提出开创意义的DGL (Dynamic Graph Learning)框架,基于动态图神经网络对部件之间的几何关系进行建模,预测每个部件的位姿.Harish et al[6]提出RGL⁃NET (Recurrent Graph Learning),利用递归图学习范式来逐步细化部件之间的关系,能获得更准确的姿态预测.Wu et al[7]提出一个基于部件的端到端生成式框架PQ⁃Net,通过三维重建对各个部件重新进行建模.Li et al[8]提出PageNet,同样采用生成式的框架,整个框架由一个基于VAEGANs[9-10]的部件生成器和一个部件组装器组成,能实现两阶段的三维部件组装.其他相关工作利用其他模态的信息来源作为输入,如Li et al[11]使用图像作为输入.最新的关于三维部件装配的研究在问题设置上作出一定调整,如Wu et al[12]按照语义信息划分不同的部件组,Xu et al[13]将任务目标转为无监督合成新的装配体.但上述工作均以装配体的部件全集作为输入来预测部件的6自由度位姿,三维装配补全在此基础上被提出,两者在任务设置上存在一定差异. ...
Banach wasserstein GAN
1
2018
... 三维部件装配是一项典型的装配任务,其目标是将一组给定的部件从头组装成完整的装配体[3-5],目前对三维部件装配的研究工作较为广泛.Zhan et al[2]首次正式定义三维部件装配问题,提出开创意义的DGL (Dynamic Graph Learning)框架,基于动态图神经网络对部件之间的几何关系进行建模,预测每个部件的位姿.Harish et al[6]提出RGL⁃NET (Recurrent Graph Learning),利用递归图学习范式来逐步细化部件之间的关系,能获得更准确的姿态预测.Wu et al[7]提出一个基于部件的端到端生成式框架PQ⁃Net,通过三维重建对各个部件重新进行建模.Li et al[8]提出PageNet,同样采用生成式的框架,整个框架由一个基于VAEGANs[9-10]的部件生成器和一个部件组装器组成,能实现两阶段的三维部件组装.其他相关工作利用其他模态的信息来源作为输入,如Li et al[11]使用图像作为输入.最新的关于三维部件装配的研究在问题设置上作出一定调整,如Wu et al[12]按照语义信息划分不同的部件组,Xu et al[13]将任务目标转为无监督合成新的装配体.但上述工作均以装配体的部件全集作为输入来预测部件的6自由度位姿,三维装配补全在此基础上被提出,两者在任务设置上存在一定差异. ...
Learning 3D part assembly from a single image
2
2020
... 三维部件装配是一项典型的装配任务,其目标是将一组给定的部件从头组装成完整的装配体[3-5],目前对三维部件装配的研究工作较为广泛.Zhan et al[2]首次正式定义三维部件装配问题,提出开创意义的DGL (Dynamic Graph Learning)框架,基于动态图神经网络对部件之间的几何关系进行建模,预测每个部件的位姿.Harish et al[6]提出RGL⁃NET (Recurrent Graph Learning),利用递归图学习范式来逐步细化部件之间的关系,能获得更准确的姿态预测.Wu et al[7]提出一个基于部件的端到端生成式框架PQ⁃Net,通过三维重建对各个部件重新进行建模.Li et al[8]提出PageNet,同样采用生成式的框架,整个框架由一个基于VAEGANs[9-10]的部件生成器和一个部件组装器组成,能实现两阶段的三维部件组装.其他相关工作利用其他模态的信息来源作为输入,如Li et al[11]使用图像作为输入.最新的关于三维部件装配的研究在问题设置上作出一定调整,如Wu et al[12]按照语义信息划分不同的部件组,Xu et al[13]将任务目标转为无监督合成新的装配体.但上述工作均以装配体的部件全集作为输入来预测部件的6自由度位姿,三维装配补全在此基础上被提出,两者在任务设置上存在一定差异. ...
... 采用多种基准模型与提出的StableFiT方法进行对比,包括Sung et al[31]的Complement,Li et al[11]的Single Image和Wang et al[14]的FiT. ...
Attention?based part assembly for 3D volumetric shape modeling
1
2023
... 三维部件装配是一项典型的装配任务,其目标是将一组给定的部件从头组装成完整的装配体[3-5],目前对三维部件装配的研究工作较为广泛.Zhan et al[2]首次正式定义三维部件装配问题,提出开创意义的DGL (Dynamic Graph Learning)框架,基于动态图神经网络对部件之间的几何关系进行建模,预测每个部件的位姿.Harish et al[6]提出RGL⁃NET (Recurrent Graph Learning),利用递归图学习范式来逐步细化部件之间的关系,能获得更准确的姿态预测.Wu et al[7]提出一个基于部件的端到端生成式框架PQ⁃Net,通过三维重建对各个部件重新进行建模.Li et al[8]提出PageNet,同样采用生成式的框架,整个框架由一个基于VAEGANs[9-10]的部件生成器和一个部件组装器组成,能实现两阶段的三维部件组装.其他相关工作利用其他模态的信息来源作为输入,如Li et al[11]使用图像作为输入.最新的关于三维部件装配的研究在问题设置上作出一定调整,如Wu et al[12]按照语义信息划分不同的部件组,Xu et al[13]将任务目标转为无监督合成新的装配体.但上述工作均以装配体的部件全集作为输入来预测部件的6自由度位姿,三维装配补全在此基础上被提出,两者在任务设置上存在一定差异. ...
Unsupervised 3D shape reconstruction by part retrieval and assembly
1
2023
... 三维部件装配是一项典型的装配任务,其目标是将一组给定的部件从头组装成完整的装配体[3-5],目前对三维部件装配的研究工作较为广泛.Zhan et al[2]首次正式定义三维部件装配问题,提出开创意义的DGL (Dynamic Graph Learning)框架,基于动态图神经网络对部件之间的几何关系进行建模,预测每个部件的位姿.Harish et al[6]提出RGL⁃NET (Recurrent Graph Learning),利用递归图学习范式来逐步细化部件之间的关系,能获得更准确的姿态预测.Wu et al[7]提出一个基于部件的端到端生成式框架PQ⁃Net,通过三维重建对各个部件重新进行建模.Li et al[8]提出PageNet,同样采用生成式的框架,整个框架由一个基于VAEGANs[9-10]的部件生成器和一个部件组装器组成,能实现两阶段的三维部件组装.其他相关工作利用其他模态的信息来源作为输入,如Li et al[11]使用图像作为输入.最新的关于三维部件装配的研究在问题设置上作出一定调整,如Wu et al[12]按照语义信息划分不同的部件组,Xu et al[13]将任务目标转为无监督合成新的装配体.但上述工作均以装配体的部件全集作为输入来预测部件的6自由度位姿,三维装配补全在此基础上被提出,两者在任务设置上存在一定差异. ...
3D assembly completion
5
2023
... 三维装配补全旨在根据给定的半成品装配体,从一系列候选部件组成的工具包中挑选合适的部件并以正确的位姿拼装,最终将半成品补装完整.Wang et al[14]首次提出并定义三维装配补全这一新任务,设计了一个基于Transformer的框架FiT (Finishing the Incomplete 3D Assembly with Transformer),通过注意力机制对候选部件与半成品部件之间的几何关系进行建模,发掘半成品真正缺失的部件并预测其位姿,完成装配补全.目前,有关三维装配补全的研究仍在初步阶段. ...
... 上述装配工作仅关注部件的几何关系,没有考虑装配体的稳定性,这一方面会影响三维装配补全的准确性,另一方面也不利于将三维装配补全真正应用于实际.本文在Wang et al[14]的基础上,设计了一种稳定性的验证方式与评价指标,并将稳定性约束引入三维装配补全框架,进一步提升补全的装配体的正确性和稳定性. ...
... 采用多种基准模型与提出的StableFiT方法进行对比,包括Sung et al[31]的Complement,Li et al[11]的Single Image和Wang et al[14]的FiT. ...
... 利用4.1所述数据对基准模型FiT[14]进行训练,训练轮次分别为20,40,80,160,320和最佳轮次的模型补全的装配体,将其如2.2所述输入NVIDIA Isaac Sim仿真环境中进行稳定性验证,得到带有稳定性标签的半成品装配体数据集.对该数据集进行一定的处理,将其中稳定装配体与不稳定装配体的比例调整至7∶3,再利用处理后的数据集训练2.3提出的稳定性判别器模型.训练过程中,设置初始学习率为0.001,batch size为64,训练轮次为200.对于椅子和桌子数据集分别按上述步骤训练得到对应的稳定性判别器模型,最终得到的椅子稳定性判别器模型的分类准确率可达80%,桌子稳定性判别器模型的分类准确率可达76%. ...
TopNet:Structural point cloud decoder
1
2019
... 三维点云补全是相近的一项任务,不同于“拼装式”补全,三维点云补全直接对点云数据中的缺失部分进行“生成式”预测和恢复,通常采用带有编码器⁃解码器框架的生成式解决方案,如Tchapmi et al[15]的TopNet,Yuan et al[16]的PCN (Point Completion Network)和Wen et al[17]的SA⁃Net (Skip⁃Attention Network).还有一些方法采用对抗学习的框架来提高点云补全的真实性和一致性,如Sarmad et al[18]的 RL⁃GAN⁃Net (Reinforcement Learning Agent Controlled GAN Network)和Hu et al[19]的Render4Completion.最近的一些工作将Transformer[20]引入三维形状补全来对点云分布进行全局建模,如Yan et al[21]的ShapeFormer和Mittal et al[22]的AutoSDF都引入了PQ⁃VAE[23-24],在离散空间中学习三维表征并用Transformer来回归补全缺失区域,Wen et al[25]的PMP⁃Net++和Li et al[26]的ProxyFormer同样使用Transformer进行三维点云补全.总体地,三维装配补全侧重于部件级别的补全,每个部件都是一组具有特定几何和语义信息的点云,而三维点云补全则侧重由于遮挡等造成的缺失补全. ...
PCN:Point completion network
1
2018
... 三维点云补全是相近的一项任务,不同于“拼装式”补全,三维点云补全直接对点云数据中的缺失部分进行“生成式”预测和恢复,通常采用带有编码器⁃解码器框架的生成式解决方案,如Tchapmi et al[15]的TopNet,Yuan et al[16]的PCN (Point Completion Network)和Wen et al[17]的SA⁃Net (Skip⁃Attention Network).还有一些方法采用对抗学习的框架来提高点云补全的真实性和一致性,如Sarmad et al[18]的 RL⁃GAN⁃Net (Reinforcement Learning Agent Controlled GAN Network)和Hu et al[19]的Render4Completion.最近的一些工作将Transformer[20]引入三维形状补全来对点云分布进行全局建模,如Yan et al[21]的ShapeFormer和Mittal et al[22]的AutoSDF都引入了PQ⁃VAE[23-24],在离散空间中学习三维表征并用Transformer来回归补全缺失区域,Wen et al[25]的PMP⁃Net++和Li et al[26]的ProxyFormer同样使用Transformer进行三维点云补全.总体地,三维装配补全侧重于部件级别的补全,每个部件都是一组具有特定几何和语义信息的点云,而三维点云补全则侧重由于遮挡等造成的缺失补全. ...
Point cloud completion by skip?attention network with hierarchical folding
1
... 三维点云补全是相近的一项任务,不同于“拼装式”补全,三维点云补全直接对点云数据中的缺失部分进行“生成式”预测和恢复,通常采用带有编码器⁃解码器框架的生成式解决方案,如Tchapmi et al[15]的TopNet,Yuan et al[16]的PCN (Point Completion Network)和Wen et al[17]的SA⁃Net (Skip⁃Attention Network).还有一些方法采用对抗学习的框架来提高点云补全的真实性和一致性,如Sarmad et al[18]的 RL⁃GAN⁃Net (Reinforcement Learning Agent Controlled GAN Network)和Hu et al[19]的Render4Completion.最近的一些工作将Transformer[20]引入三维形状补全来对点云分布进行全局建模,如Yan et al[21]的ShapeFormer和Mittal et al[22]的AutoSDF都引入了PQ⁃VAE[23-24],在离散空间中学习三维表征并用Transformer来回归补全缺失区域,Wen et al[25]的PMP⁃Net++和Li et al[26]的ProxyFormer同样使用Transformer进行三维点云补全.总体地,三维装配补全侧重于部件级别的补全,每个部件都是一组具有特定几何和语义信息的点云,而三维点云补全则侧重由于遮挡等造成的缺失补全. ...
RL?GAN?Net:A reinforcement learning agent controlled GAN network for real?time point cloud shape completion
1
2019
... 三维点云补全是相近的一项任务,不同于“拼装式”补全,三维点云补全直接对点云数据中的缺失部分进行“生成式”预测和恢复,通常采用带有编码器⁃解码器框架的生成式解决方案,如Tchapmi et al[15]的TopNet,Yuan et al[16]的PCN (Point Completion Network)和Wen et al[17]的SA⁃Net (Skip⁃Attention Network).还有一些方法采用对抗学习的框架来提高点云补全的真实性和一致性,如Sarmad et al[18]的 RL⁃GAN⁃Net (Reinforcement Learning Agent Controlled GAN Network)和Hu et al[19]的Render4Completion.最近的一些工作将Transformer[20]引入三维形状补全来对点云分布进行全局建模,如Yan et al[21]的ShapeFormer和Mittal et al[22]的AutoSDF都引入了PQ⁃VAE[23-24],在离散空间中学习三维表征并用Transformer来回归补全缺失区域,Wen et al[25]的PMP⁃Net++和Li et al[26]的ProxyFormer同样使用Transformer进行三维点云补全.总体地,三维装配补全侧重于部件级别的补全,每个部件都是一组具有特定几何和语义信息的点云,而三维点云补全则侧重由于遮挡等造成的缺失补全. ...
Render4Completion:Synthesizing multi?view depth maps for 3D shape completion
1
2019
... 三维点云补全是相近的一项任务,不同于“拼装式”补全,三维点云补全直接对点云数据中的缺失部分进行“生成式”预测和恢复,通常采用带有编码器⁃解码器框架的生成式解决方案,如Tchapmi et al[15]的TopNet,Yuan et al[16]的PCN (Point Completion Network)和Wen et al[17]的SA⁃Net (Skip⁃Attention Network).还有一些方法采用对抗学习的框架来提高点云补全的真实性和一致性,如Sarmad et al[18]的 RL⁃GAN⁃Net (Reinforcement Learning Agent Controlled GAN Network)和Hu et al[19]的Render4Completion.最近的一些工作将Transformer[20]引入三维形状补全来对点云分布进行全局建模,如Yan et al[21]的ShapeFormer和Mittal et al[22]的AutoSDF都引入了PQ⁃VAE[23-24],在离散空间中学习三维表征并用Transformer来回归补全缺失区域,Wen et al[25]的PMP⁃Net++和Li et al[26]的ProxyFormer同样使用Transformer进行三维点云补全.总体地,三维装配补全侧重于部件级别的补全,每个部件都是一组具有特定几何和语义信息的点云,而三维点云补全则侧重由于遮挡等造成的缺失补全. ...
Attention is all you need
1
2017
... 三维点云补全是相近的一项任务,不同于“拼装式”补全,三维点云补全直接对点云数据中的缺失部分进行“生成式”预测和恢复,通常采用带有编码器⁃解码器框架的生成式解决方案,如Tchapmi et al[15]的TopNet,Yuan et al[16]的PCN (Point Completion Network)和Wen et al[17]的SA⁃Net (Skip⁃Attention Network).还有一些方法采用对抗学习的框架来提高点云补全的真实性和一致性,如Sarmad et al[18]的 RL⁃GAN⁃Net (Reinforcement Learning Agent Controlled GAN Network)和Hu et al[19]的Render4Completion.最近的一些工作将Transformer[20]引入三维形状补全来对点云分布进行全局建模,如Yan et al[21]的ShapeFormer和Mittal et al[22]的AutoSDF都引入了PQ⁃VAE[23-24],在离散空间中学习三维表征并用Transformer来回归补全缺失区域,Wen et al[25]的PMP⁃Net++和Li et al[26]的ProxyFormer同样使用Transformer进行三维点云补全.总体地,三维装配补全侧重于部件级别的补全,每个部件都是一组具有特定几何和语义信息的点云,而三维点云补全则侧重由于遮挡等造成的缺失补全. ...
ShapeFormer:Transformer?based shape completion via sparse representation
1
2022
... 三维点云补全是相近的一项任务,不同于“拼装式”补全,三维点云补全直接对点云数据中的缺失部分进行“生成式”预测和恢复,通常采用带有编码器⁃解码器框架的生成式解决方案,如Tchapmi et al[15]的TopNet,Yuan et al[16]的PCN (Point Completion Network)和Wen et al[17]的SA⁃Net (Skip⁃Attention Network).还有一些方法采用对抗学习的框架来提高点云补全的真实性和一致性,如Sarmad et al[18]的 RL⁃GAN⁃Net (Reinforcement Learning Agent Controlled GAN Network)和Hu et al[19]的Render4Completion.最近的一些工作将Transformer[20]引入三维形状补全来对点云分布进行全局建模,如Yan et al[21]的ShapeFormer和Mittal et al[22]的AutoSDF都引入了PQ⁃VAE[23-24],在离散空间中学习三维表征并用Transformer来回归补全缺失区域,Wen et al[25]的PMP⁃Net++和Li et al[26]的ProxyFormer同样使用Transformer进行三维点云补全.总体地,三维装配补全侧重于部件级别的补全,每个部件都是一组具有特定几何和语义信息的点云,而三维点云补全则侧重由于遮挡等造成的缺失补全. ...
AutoSDF:Shape priors for 3D completion,reconstruction and generation
1
2022
... 三维点云补全是相近的一项任务,不同于“拼装式”补全,三维点云补全直接对点云数据中的缺失部分进行“生成式”预测和恢复,通常采用带有编码器⁃解码器框架的生成式解决方案,如Tchapmi et al[15]的TopNet,Yuan et al[16]的PCN (Point Completion Network)和Wen et al[17]的SA⁃Net (Skip⁃Attention Network).还有一些方法采用对抗学习的框架来提高点云补全的真实性和一致性,如Sarmad et al[18]的 RL⁃GAN⁃Net (Reinforcement Learning Agent Controlled GAN Network)和Hu et al[19]的Render4Completion.最近的一些工作将Transformer[20]引入三维形状补全来对点云分布进行全局建模,如Yan et al[21]的ShapeFormer和Mittal et al[22]的AutoSDF都引入了PQ⁃VAE[23-24],在离散空间中学习三维表征并用Transformer来回归补全缺失区域,Wen et al[25]的PMP⁃Net++和Li et al[26]的ProxyFormer同样使用Transformer进行三维点云补全.总体地,三维装配补全侧重于部件级别的补全,每个部件都是一组具有特定几何和语义信息的点云,而三维点云补全则侧重由于遮挡等造成的缺失补全. ...
Neural discrete representation learning
1
2017
... 三维点云补全是相近的一项任务,不同于“拼装式”补全,三维点云补全直接对点云数据中的缺失部分进行“生成式”预测和恢复,通常采用带有编码器⁃解码器框架的生成式解决方案,如Tchapmi et al[15]的TopNet,Yuan et al[16]的PCN (Point Completion Network)和Wen et al[17]的SA⁃Net (Skip⁃Attention Network).还有一些方法采用对抗学习的框架来提高点云补全的真实性和一致性,如Sarmad et al[18]的 RL⁃GAN⁃Net (Reinforcement Learning Agent Controlled GAN Network)和Hu et al[19]的Render4Completion.最近的一些工作将Transformer[20]引入三维形状补全来对点云分布进行全局建模,如Yan et al[21]的ShapeFormer和Mittal et al[22]的AutoSDF都引入了PQ⁃VAE[23-24],在离散空间中学习三维表征并用Transformer来回归补全缺失区域,Wen et al[25]的PMP⁃Net++和Li et al[26]的ProxyFormer同样使用Transformer进行三维点云补全.总体地,三维装配补全侧重于部件级别的补全,每个部件都是一组具有特定几何和语义信息的点云,而三维点云补全则侧重由于遮挡等造成的缺失补全. ...
Taming transformers for high?resolution image synthesis
1
2021
... 三维点云补全是相近的一项任务,不同于“拼装式”补全,三维点云补全直接对点云数据中的缺失部分进行“生成式”预测和恢复,通常采用带有编码器⁃解码器框架的生成式解决方案,如Tchapmi et al[15]的TopNet,Yuan et al[16]的PCN (Point Completion Network)和Wen et al[17]的SA⁃Net (Skip⁃Attention Network).还有一些方法采用对抗学习的框架来提高点云补全的真实性和一致性,如Sarmad et al[18]的 RL⁃GAN⁃Net (Reinforcement Learning Agent Controlled GAN Network)和Hu et al[19]的Render4Completion.最近的一些工作将Transformer[20]引入三维形状补全来对点云分布进行全局建模,如Yan et al[21]的ShapeFormer和Mittal et al[22]的AutoSDF都引入了PQ⁃VAE[23-24],在离散空间中学习三维表征并用Transformer来回归补全缺失区域,Wen et al[25]的PMP⁃Net++和Li et al[26]的ProxyFormer同样使用Transformer进行三维点云补全.总体地,三维装配补全侧重于部件级别的补全,每个部件都是一组具有特定几何和语义信息的点云,而三维点云补全则侧重由于遮挡等造成的缺失补全. ...
PMP?Net++:Point cloud completion by transformer?enhanced multi?step point moving paths
1
2023
... 三维点云补全是相近的一项任务,不同于“拼装式”补全,三维点云补全直接对点云数据中的缺失部分进行“生成式”预测和恢复,通常采用带有编码器⁃解码器框架的生成式解决方案,如Tchapmi et al[15]的TopNet,Yuan et al[16]的PCN (Point Completion Network)和Wen et al[17]的SA⁃Net (Skip⁃Attention Network).还有一些方法采用对抗学习的框架来提高点云补全的真实性和一致性,如Sarmad et al[18]的 RL⁃GAN⁃Net (Reinforcement Learning Agent Controlled GAN Network)和Hu et al[19]的Render4Completion.最近的一些工作将Transformer[20]引入三维形状补全来对点云分布进行全局建模,如Yan et al[21]的ShapeFormer和Mittal et al[22]的AutoSDF都引入了PQ⁃VAE[23-24],在离散空间中学习三维表征并用Transformer来回归补全缺失区域,Wen et al[25]的PMP⁃Net++和Li et al[26]的ProxyFormer同样使用Transformer进行三维点云补全.总体地,三维装配补全侧重于部件级别的补全,每个部件都是一组具有特定几何和语义信息的点云,而三维点云补全则侧重由于遮挡等造成的缺失补全. ...
ProxyFormer:Proxy alignment assisted point cloud completion with missing part sensitive transformer
1
2023
... 三维点云补全是相近的一项任务,不同于“拼装式”补全,三维点云补全直接对点云数据中的缺失部分进行“生成式”预测和恢复,通常采用带有编码器⁃解码器框架的生成式解决方案,如Tchapmi et al[15]的TopNet,Yuan et al[16]的PCN (Point Completion Network)和Wen et al[17]的SA⁃Net (Skip⁃Attention Network).还有一些方法采用对抗学习的框架来提高点云补全的真实性和一致性,如Sarmad et al[18]的 RL⁃GAN⁃Net (Reinforcement Learning Agent Controlled GAN Network)和Hu et al[19]的Render4Completion.最近的一些工作将Transformer[20]引入三维形状补全来对点云分布进行全局建模,如Yan et al[21]的ShapeFormer和Mittal et al[22]的AutoSDF都引入了PQ⁃VAE[23-24],在离散空间中学习三维表征并用Transformer来回归补全缺失区域,Wen et al[25]的PMP⁃Net++和Li et al[26]的ProxyFormer同样使用Transformer进行三维点云补全.总体地,三维装配补全侧重于部件级别的补全,每个部件都是一组具有特定几何和语义信息的点云,而三维点云补全则侧重由于遮挡等造成的缺失补全. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}