

1 自校正滤波算法
图1
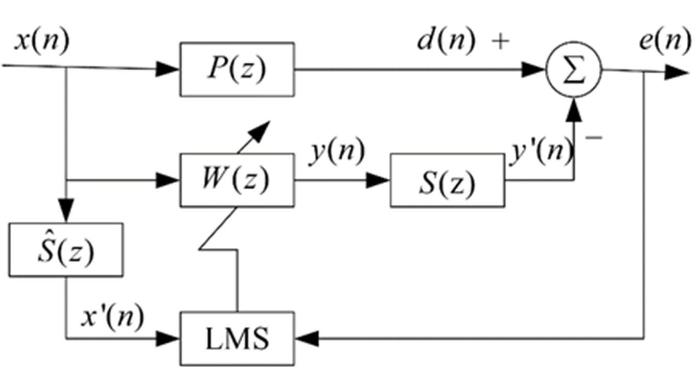
图1
基于FxLMS算法的自适应前馈控制系统
Fig.1
Block diagram of adaptive feedforward control system based on FxLMS algorithm
如图1,自适应滤波器W(z)的输出:
其中,
其中,
FxLMS算法采用最小均方误差准则,用梯度下降法得到控制器
其中,
是滤波后的参考信号,
是
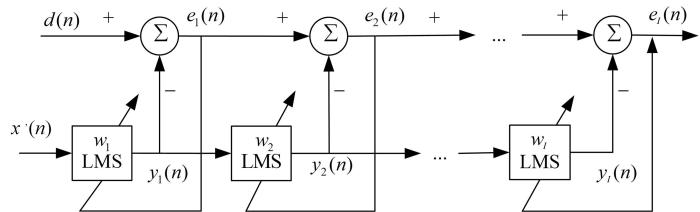
自校正FxLMS(Self⁃correcting FxLMS,SC⁃FxLMS)算法将前一级滤波器的输出作为后一级滤波器的输入,图2和图3分别给出了两种SC⁃FxLMS算法,区别在于:图2所有级使用相同的期望信号
图2
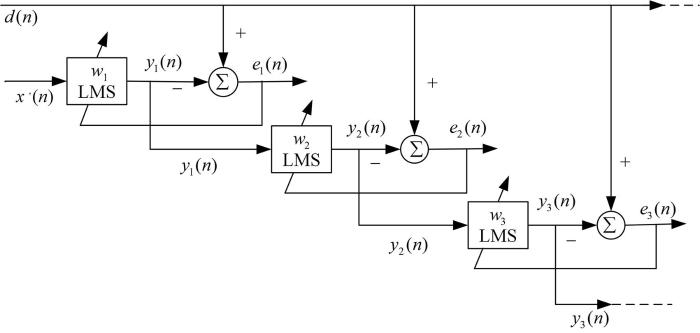
图3
对于DSC⁃FxLMS算法,第一级(i=1)的滤波器系数迭代公式与
(i>1),其滤波器系数迭代公式为:
其中
对于ESC⁃FxLMS算法,第一级(i=1)的滤波器系数迭代公式与
因此,对于DSC⁃FxLMS,ESC⁃FxLMS两种算法,需要设定的参数包括:级数I,每级滤波器的阶数L(这里设定每级滤波器阶数完全相同)和每一级的步长µ.步长µ的选择与FxLMS算法类似,实际使用时需要尝试,建议不宜选择过大,否则会导致系统不稳定.级数I和滤波器的阶数L选择满足
表1 三种算法的主要计算量
Table 1
| 算法 | 乘法 | 加法 |
|---|---|---|
| FxLMS | 2LI +P+1 | 2LI +P-2 |
| DSC⁃FxLMS | 2IL+P+I | 2IL+P-2 |
| ESC⁃FxLMS | 2IL+P+I | 2IL+P-2 |
以I=6级L=2阶滤波器串联、P=256为例,FxLMS算法的乘法和加法分别为385和382,DSC⁃FxLMS与ESC⁃FxLMS算法的乘法和加法分别为281和278.
2 实验验证与分析
2.1 实验设置
本文验证了三种算法在有源降噪耳机中的实际效果.如图4所示,将市场上购买的有源降噪耳机用作原型佩戴到B&K公司的人工头(4182C)上,在保持耳机整体结构不变的情况下拆分引出参考传声器、误差传声器、次级信号线,将参考传声器、误差传声器通过传声器前放连接到B&K公司的Pulse上.Pulse一方面将参考信号、误差信号与次级信号输送到电脑,另一方面也将噪声信号传送给扬声器(初级噪声源).
图4
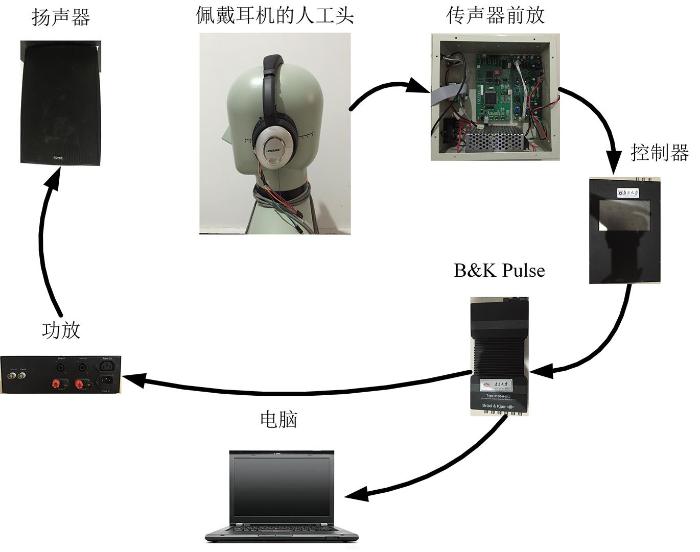
图4
有源降噪耳机实验系统的器件连接
Fig.4
The devices connection in the active noise control headphone experiments
实验在全消声室中进行,如图5所示,初级声源分别位于人工头正前方、正左方、正右方和正后方,距离人工头0.3 m,初级噪声信号为白噪声.系统的采样率为16000 Hz.采用最小均方误差(LMS)算法估计出次级路径
图5
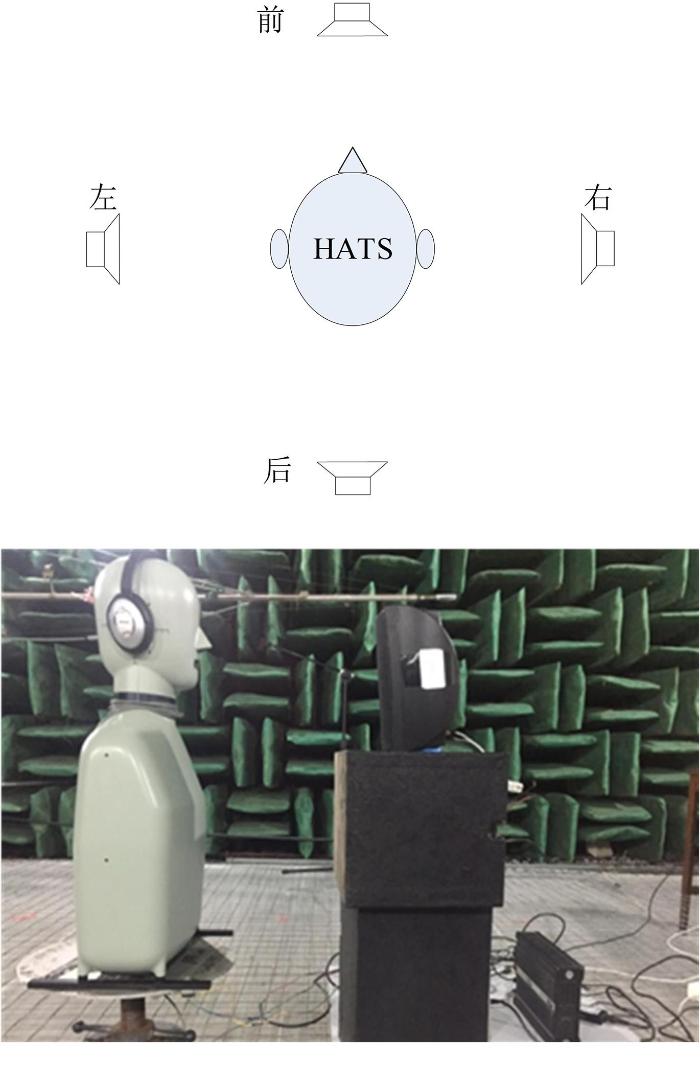
图5
初级声源的四个位置(上)以及消声室中的实验场景(下)
Fig.5
Diagrammatic view of the four different incident directions of the primary noise (up) and the experimental configuration in the anechoic chamber (down)
2.2 结果与讨论
本文以降噪量评价降噪性能的好坏,降噪量为ANC系统关闭与打开两种情况下误差传声器信号的功率谱密度之差.实验分别对四个不同入射方向进行降噪性能测试,发现左右两只耳朵的性能几乎一样.为了在一幅图中更加清晰简洁地看出每种算法的降噪量,取右耳四个不同入射方向初级噪声源降噪量的平均值进行对比.
本文选用FxLMS,DSC⁃FxLMS,ESC⁃FxLMS三种算法分别迭代得到三种控制器权系数矢量后,对比三种算法的降噪量.控制器
表2 三种算法的参数设定
Table 2
| 算法 | FxLMS | DSC⁃FxLMS | ESC⁃FxLMS |
|---|---|---|---|
| 步长 | |||
自适应滤波器长度 串联个数 |
三种算法的降噪量如图6a所示,FxLMS算法在218 Hz附近获得28 dB的最大降噪量,其有效降噪频段在2800 Hz以下,在3900 Hz左右出现了3 dB的最大噪声抬升,并且在2300~2800 Hz频段内降噪量几乎为0;DSC⁃FxLMS算法和ESC⁃FxLMS算法的有效降噪频段均在3800 Hz以下,在3800~4300 Hz频段内的噪声抬升比FxLMS算法小1~2 dB.
图6

图6
I=6, L=2时三种算法的性能
Fig. 6
The performance of three algorithms with I=6 and L=2
3 结论
本文通过在前馈自适应降噪系统中串联多个低阶滤波器,研究了一种自校正自适应算法.在有源降噪耳机实例中的验证结果表明,与FxLMS算法相比,该算法计算复杂度低,有效降噪带宽大和高频噪声抬升小.虽然两种算法的每一级都是LMS算法的结构,其稳定性可以参考LMS算法,但这两种算法稳定性的理论分析、步长的理论上界都值得进一步研究.
参考文献
频域自适应算法在有源噪声控制系统中的性能研究
Investigation of the performance of frequency domain adaptive algorithms in active noise control system
A recursive least square algorithm for active control of mixed noise
An active impulsive noise control algorithm with logarithmic transformation
Performance analysis of a diffusion control method for ANC systems and the network design
小开口声传输有源控制的次级源和误差传感策略研究
Secondary source and error sensing strategies for active control of sound transmission via a small opening
Combination of robust algorithm and head⁃tracking for a feedforward active headrest
Head tracking extends local active control of broadband sound to higher frequencies
Head movement immune active noise control with head mounted moving microphones
Adaptive nonlinear active noise control algorithm for active headrest with moving error microphones
Active interior noise control for rail vehicle using a variable step⁃size median⁃LMS algorithm
Exploiting the underdetermined system in multichannel active noise control for open windows
Mixed⁃error approach for multi⁃channel active noise control of open windows
Performance analysis of the self⁃correcting adaptive filter
∥

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}