


随着无线通信技术的发展,第六代移动通信系统(6G)网络将从平面向立体延伸、从局部向全球延伸、从中低频向高频延伸,进而支持未来立体全场景通信服务,实现全球无缝覆盖.室内场景作为6G地面致密网络的重要组成部分,精准的室内定位技术是实现各类物联网应用的前提.在室内定位过程中,复杂的建筑结构会阻碍直视路径的传播[1],信号在障碍物之间经过反射、衍射以及散射传播至接收端[2].与没有任何遮挡的视距(Line⁃of⁃Sight,LoS)状态下传播的信号相比,非视距(None⁃Line⁃of⁃Sight,NLoS)状态下传播的信号增加了到达时间,改变了到达角度,所以,直接利用NLoS信号作为定位测量的信号,可能会导致很大的定位误差[3].因此,识别非视距信号有助于提高定位的准确度[4].
目前已有多种NLoS信号识别技术被提出.Schroeder et al[5]提出的NLoS信号识别方法是基于距离估计的时间序列,这种方法的主要缺点是在测距过程中会造成难以消除的时间延迟[6].Tuchler and Huber[7]基于位置估计使用最小二乘法来识别NLoS信号,该方法利用冗余距离估计收集不同的子集来识别NLoS信号,但在没有冗余距离估计的情况下这种方法是无效的.Xiao et al[8]基于信道冲激响应(Channel Impulse Response,CIR)采用人工神经网络提取LoS/NLoS信号的特征并进行训练,然后通过聚类的方式进行区分.该方法是当前被广泛使用的NLoS识别方法,其中峰度[9]、均方根延迟扩展[10]、偏度[11-13]、莱斯
LoS信号不容易受外部干扰,和NLoS信号相比,能量更强且更集中,峰度特征能够表征信号能量分布的集中程度,所以峰度越大越有可能是LoS信号.LoS信号的传输时间短于NLoS信号,故可以用均方根延迟扩展来表征不同信号的多径信道延迟信息.由于LoS信号服从莱斯分布[11],NLoS信号服从瑞利分布,而瑞利分布的偏度为常数,且一般大于莱斯分布的偏度[12],因此LoS信号比NLoS信号偏度更小,也就是说LoS信号比NLoS信号更对称[13].莱斯
上述特征用于识别LoS/NLoS信号的原理是LoS信号的主导路径是直接路径,而NLoS信号由于障碍物阻挡了直接路径,信号只能通过折射、散射和衍射等非直接路径传播,这加剧了信号损耗,所以LoS信号与NLoS信号的功率有较大差异.本文利用该原理提出一种基于物理层峰均比的识别方法,提高了识别准确率并有效缩短了运行时间.
1 非视距识别
在复杂的室内环境中,由于发射端与接收端(Transmitter and Receiver,T/R)之间存在障碍物,导致信号通过多路径传播.其中,LoS路径是指信号在T/R之间直接传播,NLoS路径是指信号在障碍物之间经过反射、衍射以及散射传播至接收端.图1说明了两种常见的情况.
图1

2 信号预处理过程
在IEEE802.15.4a信道模型下,利用矢量网络分析仪收集到的快照信息以信道状态信息(Channel State Information,CSI)的格式显示.CSI代表T/R之间通信链路的属性参数,每一个CSI描述子载波的幅度与相位,如
其中,
对
其中,
阈值表示为:
其中,
3 峰均比特征识别
无线信号从时域上观测时可以得到幅度不断变化的正弦波,利用信号的峰值功率和平均功率可以得到信号的峰均比(Peak to Average Ratio,PAR),它可以表达信号的起伏程度,一般也称为峰值因子.峰均比的定义如
其中,
图2

根据LoS与NLoS两种信号的峰均比分布不同,采用二元假设检验来判断当前信道是否为NLoS信道.给定峰均比特征
其中,
4 测量场景描述
实验场景是一个8 m×4 m的多人小型会议室,会议室配有桌子、椅子、电脑、其他木质和金属家具.测量带宽范围为2.4 G~5.4 GHz.发射机与接收机位置固定,采用Huber Suhner公司的全向天线,单收单发.测量过程中通过摆放在不同位置的天线收集LoS与NLoS信号:设置五个发射机位置,三个发射机在会议室内用于测量LoS场景下的信道状态信息,两个发射机在会议室外用于NLoS场景;接收天线的位置在会议室内,共88个.本次测量在稳定的静态环境下进行,测量对仪器设备的稳定性和准确性要求很高,发射天线与接收天线的位置由全站经纬仪测量,提供亚厘米区域的精度.使用Keysight5公司的P5008A型矢量网络分析仪测量数据,收发端在同一个设备上.矢量网络分析仪通过笔记本控制测量的参数以及保存数据,通过USB数据线连接,得到每个测量值的快照.
图3
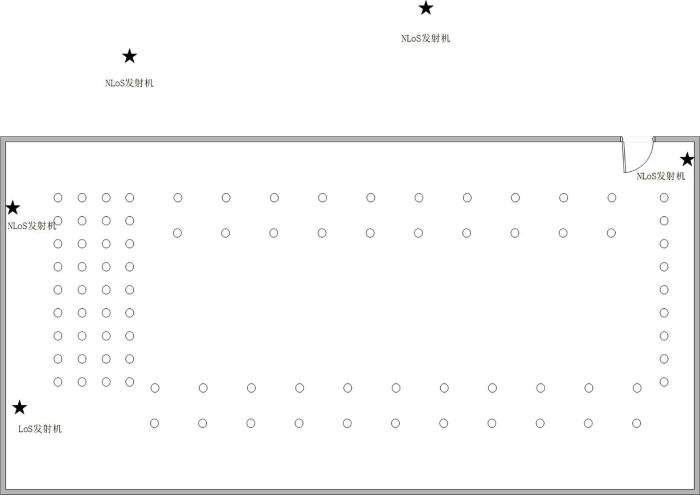
图4

5 计算仿真与分析
5.1 数据获取
如第4节所述,在稳定的静态环境下使用矢量网络分析仪来测量数据,并收集带宽为3 GHz的信道状态参数.一共有584个真实数据,其中LoS信号361个,NLoS信号223个.将所有数据分成两个集合,即训练集与测试集.
尽管CSI包含了信号通信链路的状态信息,但由于环境噪声影响以及发射机与接收机之间缺乏时间和频率同步,仍然需要对数据进行线性修正,降低相位噪声和同步误差带来的前端效应.
5.2 算法仿真与性能分析
测试集中有264个LoS信号冲激响应,141个NLoS信号冲激响应,得到信号的峰均比后,使用似然比假设检验的方法来区分信道状态.为了评估算法的有效性,设立如下的评判指标,
其中,
图5
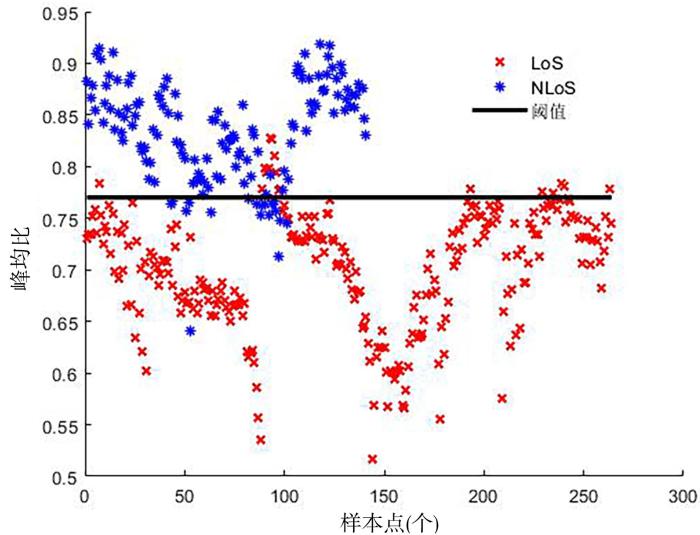
图5
LoS/NLoS条件下的CIR统计峰均比特征
Fig.5
CIR statistics PAR characteristics under NLoS/LoS condition
均方根延迟扩展、峰度与莱斯
图6
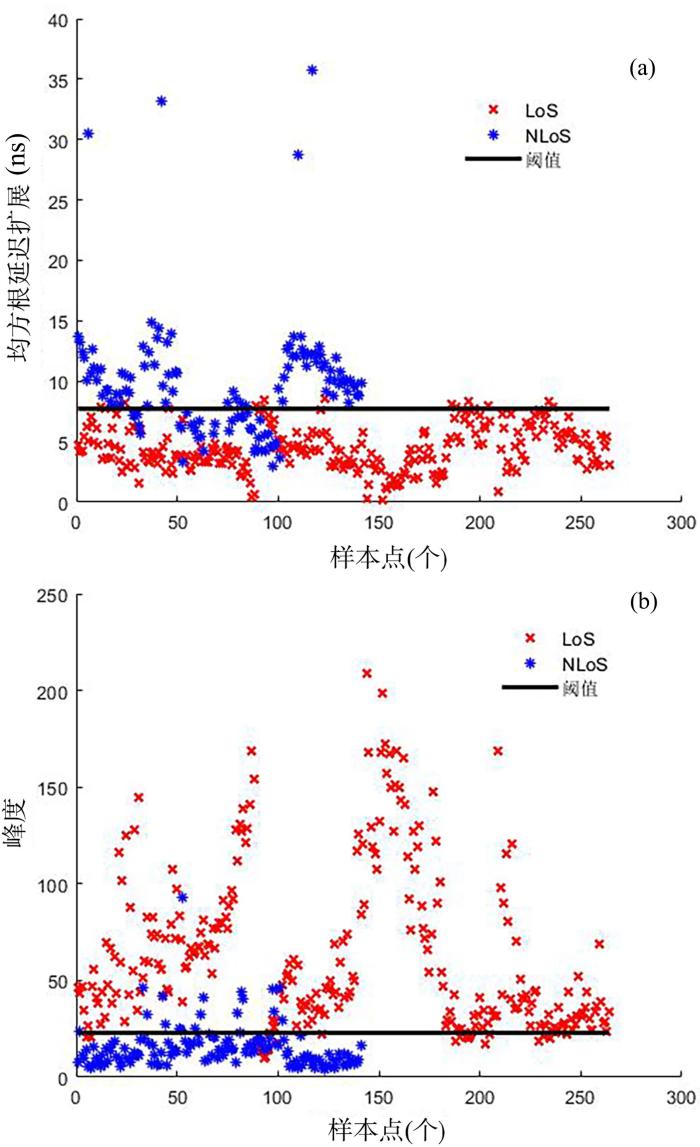
图6
LoS/NLoS条件下的CIR统计特征
Fig.6
CIR statistical characteristics under LoS/NLoS conditions
图7

图7
基于LiFi对比模型下不同特征的识别算法
Fig.7
Different feature identification algorithm based on LiFi comparison model
整理图5、图6和图7的结果,得到的表1比较了不同特征识别结果与本文提出的峰均比特征的分类性能(如表中黑体字所示).由表可知,峰均比特征的LoS信号识别率为93.56%,比峰度特征的90.91%高2.65%,比均方根延迟扩展的89.77%高3.79%;峰均比特征的NLoS信号识别率为87.23%,比峰度特征的86.52%高0.71%,比均方根延迟扩展的73.76%高13.47%;而峰均比与均方根延迟扩展和峰度特征结合,由于存在一定的相关性,所以性能变化不明显.其中,峰均比与峰度特征结合使NLoS识别率和峰均比NLoS识别率相同,说明两种特征中没有彼此可以利用的有效信息,导致结合后的NLoS识别率与峰均比NLoS识别率都一样.综上所述,使用峰均比特征判断信道状态能够有效地提高识别准确率.
表1 不同特征的性能分析
Table 1
| 识别方法 | ||
|---|---|---|
| 均方根延迟扩展 | 89.77% | 73.76% |
| 峰度 | 90.91% | 86.52% |
| 峰均比 | 93.56% | 87.23% |
| LiFi模型下峰均比与均方根延迟扩展结合 | 92.37% | 82.27% |
| LiFi模型下峰均比与峰度结合 | 93.56% | 87.23% |
对信号进行识别完成后,本文选取路径损耗模型与最小二乘算法进行定位.首先分别建立LoS与NLoS信号的路径损耗模型;之后把在第4节场景中测量的数据分为四组:已知信号类型分别为LoS/NLoS信号、未知信号经过峰均比特征判定为LoS/NLoS信号、未知信号经过峰度特征判定为LoS/NLoS信号、未知信号全部假定为LoS信号;再将四组信号带入对应的路径损耗模型中预测距离;最后使用最小二乘算法定位.四组信号的定位效果如图8所示.
图8
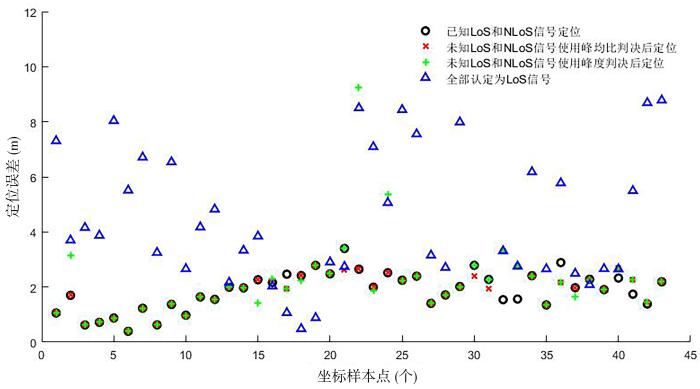
图8
信号识别前后定位效果对比图
Fig.8
Comparison chart of positioning effect before and after signal recognition
从图8可以看出,当不对信号进行识别,全部认定为LoS信号时,定位误差最大.当使用特征对信号识别后,定位误差明显比全部认定为LoS信号的定位误差小,说明对信号进行识别能够有效降低定位误差.还可以看出峰均比特征识别后定位误差小于峰度特征识别的定位误差,说明峰均比特征的识别准确率高.
6 结论
在室内定位系统中,影响定位精度的主要原因是NLoS传播,所以识别NLoS信号是提高定位精度的主要方法.本文提出一种新的NLoS识别算法,利用的是峰均比特征的统计特性.实验结果表明,与现有的识别特征相比,使用该特征判断信道状态能在一定程度上提高识别准确率,且具有识别过程简单、计算复杂度低、运行时间短等优点.本文还研究了识别算法对定位精度的影响,结果表明该算法能有效提高定位精度,具有一定的应用前景.后续工作将使用深度学习算法寻找更多识别LoS/NLoS信号的特征,然后进行特征组合使识别准确率高于单一特征,再对识别出的NLoS信号进行缓解,达到提高定位精度的目的.
参考文献
Millimeter wave LoS/NLoS identification and localization via mean⁃shift clustering
∥
A novel NLoS mitigation algorithm for UWB localization in harsh indoor environments
Non⁃line⁃of⁃sight identification based on unsupervised machine learning in ultra wideband systems
Nothing blocks me:Precise and real⁃time LoS/NLoS path recognition in RFID systems
NLoS detection algorithms for Ultra⁃Wideband localization
∥
NLoS identification for UWB based on channel impulse response
∥
An improved algorithm for UWB⁃bases positioning in a multi⁃path environment
∥
AmpN:Real⁃time LoS/NLoS identification with WiFi
∥
Application of one⁃class classification in NLoS identification of UWB positioning
∥
LOS/NLOS channel identification technology based on CNN
∥
一种新颖的基于偏度的非视距区分算法
A novel non⁃line⁃of⁃sight identification algorithm based on skewness
Channel non⁃line⁃of⁃sight identification based on convolutional neural networks
Machine learning⁃enabled LoS/NLoS identification for MIMo systems in dynamic environments
两种隧道场景下车对车无线信道衰落特性的测量与分析
Measurement and analysis of fading characteristics of V2V propagation channel in two tunnels
Deep learning based NLoS identification with commodity WLAN devices
Identification and mitigation of NLOS based on channel state information for indoor WiFi localization
∥
高速无线通信高阶多普勒谱估计方法
Method of high order Doppler frequency shift estimation for high⁃speed wireless communication
An UWB channel impulse response de⁃noising method for NLoS/LoS classification boosting
Efficient time domain threshold for sparse channel estimation in OFDM system
Efficient DFT⁃based channel estimation for OFDM systems on multipath channels
NLoS and LoS of the 28 GHz bands millimeter⁃wave in 5G cellular networks
∥
WiFi⁃based indoor line⁃of⁃sight identification

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}