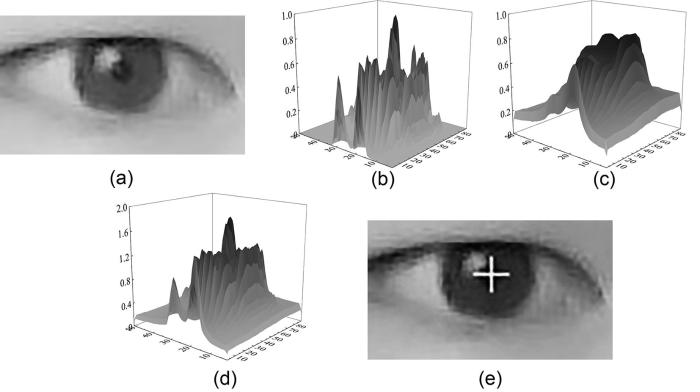
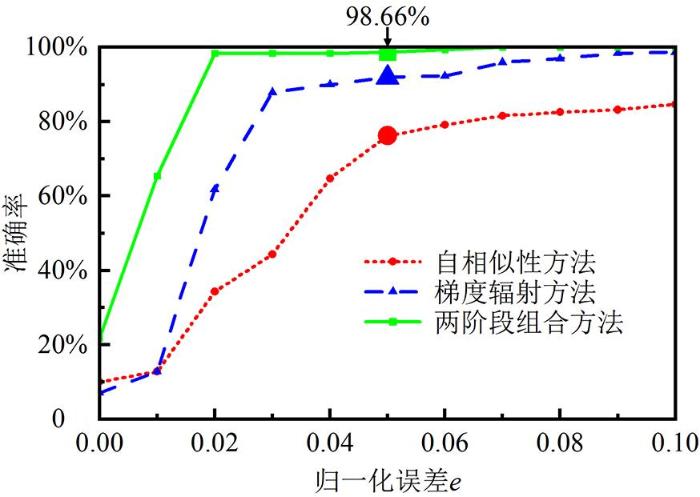
Accurate pupil localization is widely used in fatigue monitoring,attention analysis,gaze tracking,and other fields. Currently,there are two difficult problems in the research of pupil localization. (1) The accuracy of pupil detection is affected by image resolution,illuminance,and head pose,and thus the accuracy of localization under natural conditions is relatively low.(2) Iris color affects the accuracy of localization,but the current research on pupil localization methods for different iris colors is not perfect. To address these two problems,this study proposes a new pupil localization method for whole⁃face images. The proposed method requires no training and is directly used for pupil localization tasks. The core of the method is to combine the self⁃similarity score representing the local radial symmetry,with the gradient radiation score of the eye area calculated based on the gradient information between the pupil and the surrounding area,then take the peak coordinate of the joint score as the pupil center. The approach was on the BioID,GI4E dataset. At a normalized error of ,the accuracy is 94.67% (BioID) and 97.09% (GI4E),respectively. At a normalized error of ,the accuracy is 99.47% (BioID) and 99.51% (GI4E) ,respectively. The proposed approach on the self⁃made dataset composed of low⁃resolution dark iris facial images yields an accuracy of 98.66% () and 100% (),indicating that the proposed approach has preferable robustness to iris color.
Luo Yabo, Li Xin. Accurate pupil localization method considering recognition robustness and the influence of iris color. Journal of nanjing University[J], 2024, 60(1): 97-105 doi:10.13232/j.cnki.jnju.2024.01.010
形状结构特征和外观纹理特征是瞳孔检测常用的特征,Hough变换是常用的目标检测方法,但准确率有限且运算量大.因此张宏薇等[3]提出改进的Hough变换检测瞳孔,由于设置了检测圆的半径范围,所以在准确率和检测速度方面,比仅利用Hough变换有显著提升,但不同数据集的规格不同,需要人工设置半径范围,算法的自适应性不高,且对图像分辨率要求较高.Gu et al[4]使用轮廓跟踪方法提取瞳孔区域,确定区域质心为瞳孔中心,该方法适用于不规则瞳孔的检测,并且可以满足实时检测的要求,但由于使用固定阈值进行二值化,不能适应光照变化,鲁棒性较差.宋保全等[5]基于亚像素边缘的多模板匹配算法定位瞳孔,提取训练样本图像的亚像素边缘创建匹配模板,使用创建好的模板集合对待测图像进行匹配,该方法不易受个体差异影响,无需人工调参,具有一定的鲁棒性.王鹏等[6]基于近眼红外图像,获取最大连通域后边缘检测,利用改进的最小二乘椭圆拟合定位瞳孔中心,可以解决反射光斑干扰以及瞳孔被部分遮挡的问题.Zhou et al[7]基于参数优化,设置三步阈值,二值化图像后提取瞳孔轮廓,能够较好地解决瞳孔与背景灰度值接近时定位精度下降的问题.El et al[8]提出带变形边缘检测的霍夫圆变换算法检测瞳孔,通过多次滤波处理图像,使用Canny算子检测瞳孔边缘,经过细化去除不满足曲率的边缘,能够较好地去除模糊和噪声对检测精度的影响.
目前主流的瞳孔检测方法是基于深度学习的方法,Khan et al[9]提出一种深度学习和图像处理算法相结合的瞳孔定位方法,通过深度神经网络获取眼部图像,在眼图上利用多级卷积来找到所识别的眼眶内瞳孔的最佳水平和垂直坐标.崔家礼等[10]基于卷积神经网络,在网络结构中减少下采样因子,增加扩张残差单元,实现复杂场景下的直接人眼检测.Gdoura et al[11]结合了卷积神经网络和类似马尔可夫随机场的过程,提出一种轻量级的混合模型,能够在相同的卷积层上运行不同的图像尺度,在性能提高的基础上,显著降低模型大小.尽管使用大量标记瞳孔中心的样本进行训练可以获得较好的结果,但是此类方法训练耗时,且高质量的数据集有限.此外,深度学习模型在实际应用中涉及模型部署,要解决模型框架兼容性差,所需的环境难以配置的问题,以及深度学习模型的结构通常比较庞大,需要大量的算力才能满足实时运行的需求,模型的运行效率需要优化的问题.
DaiL H, LiuJ G, JuZ J,et al. Iris center localization using energy map synthesis based on gradient and isophote. Journal of Intelligent & Fuzzy Systems:Applications in Engineering and Technology,2020,38(4):4511-4523.
... 形状结构特征和外观纹理特征是瞳孔检测常用的特征,Hough变换是常用的目标检测方法,但准确率有限且运算量大.因此张宏薇等[3]提出改进的Hough变换检测瞳孔,由于设置了检测圆的半径范围,所以在准确率和检测速度方面,比仅利用Hough变换有显著提升,但不同数据集的规格不同,需要人工设置半径范围,算法的自适应性不高,且对图像分辨率要求较高.Gu et al[4]使用轮廓跟踪方法提取瞳孔区域,确定区域质心为瞳孔中心,该方法适用于不规则瞳孔的检测,并且可以满足实时检测的要求,但由于使用固定阈值进行二值化,不能适应光照变化,鲁棒性较差.宋保全等[5]基于亚像素边缘的多模板匹配算法定位瞳孔,提取训练样本图像的亚像素边缘创建匹配模板,使用创建好的模板集合对待测图像进行匹配,该方法不易受个体差异影响,无需人工调参,具有一定的鲁棒性.王鹏等[6]基于近眼红外图像,获取最大连通域后边缘检测,利用改进的最小二乘椭圆拟合定位瞳孔中心,可以解决反射光斑干扰以及瞳孔被部分遮挡的问题.Zhou et al[7]基于参数优化,设置三步阈值,二值化图像后提取瞳孔轮廓,能够较好地解决瞳孔与背景灰度值接近时定位精度下降的问题.El et al[8]提出带变形边缘检测的霍夫圆变换算法检测瞳孔,通过多次滤波处理图像,使用Canny算子检测瞳孔边缘,经过细化去除不满足曲率的边缘,能够较好地去除模糊和噪声对检测精度的影响. ...
Research and implementation of pupil recognition based on Hough transform
1
2016
... 形状结构特征和外观纹理特征是瞳孔检测常用的特征,Hough变换是常用的目标检测方法,但准确率有限且运算量大.因此张宏薇等[3]提出改进的Hough变换检测瞳孔,由于设置了检测圆的半径范围,所以在准确率和检测速度方面,比仅利用Hough变换有显著提升,但不同数据集的规格不同,需要人工设置半径范围,算法的自适应性不高,且对图像分辨率要求较高.Gu et al[4]使用轮廓跟踪方法提取瞳孔区域,确定区域质心为瞳孔中心,该方法适用于不规则瞳孔的检测,并且可以满足实时检测的要求,但由于使用固定阈值进行二值化,不能适应光照变化,鲁棒性较差.宋保全等[5]基于亚像素边缘的多模板匹配算法定位瞳孔,提取训练样本图像的亚像素边缘创建匹配模板,使用创建好的模板集合对待测图像进行匹配,该方法不易受个体差异影响,无需人工调参,具有一定的鲁棒性.王鹏等[6]基于近眼红外图像,获取最大连通域后边缘检测,利用改进的最小二乘椭圆拟合定位瞳孔中心,可以解决反射光斑干扰以及瞳孔被部分遮挡的问题.Zhou et al[7]基于参数优化,设置三步阈值,二值化图像后提取瞳孔轮廓,能够较好地解决瞳孔与背景灰度值接近时定位精度下降的问题.El et al[8]提出带变形边缘检测的霍夫圆变换算法检测瞳孔,通过多次滤波处理图像,使用Canny算子检测瞳孔边缘,经过细化去除不满足曲率的边缘,能够较好地去除模糊和噪声对检测精度的影响. ...
Real?time pupil detection based on contour tracking
1
2022
... 形状结构特征和外观纹理特征是瞳孔检测常用的特征,Hough变换是常用的目标检测方法,但准确率有限且运算量大.因此张宏薇等[3]提出改进的Hough变换检测瞳孔,由于设置了检测圆的半径范围,所以在准确率和检测速度方面,比仅利用Hough变换有显著提升,但不同数据集的规格不同,需要人工设置半径范围,算法的自适应性不高,且对图像分辨率要求较高.Gu et al[4]使用轮廓跟踪方法提取瞳孔区域,确定区域质心为瞳孔中心,该方法适用于不规则瞳孔的检测,并且可以满足实时检测的要求,但由于使用固定阈值进行二值化,不能适应光照变化,鲁棒性较差.宋保全等[5]基于亚像素边缘的多模板匹配算法定位瞳孔,提取训练样本图像的亚像素边缘创建匹配模板,使用创建好的模板集合对待测图像进行匹配,该方法不易受个体差异影响,无需人工调参,具有一定的鲁棒性.王鹏等[6]基于近眼红外图像,获取最大连通域后边缘检测,利用改进的最小二乘椭圆拟合定位瞳孔中心,可以解决反射光斑干扰以及瞳孔被部分遮挡的问题.Zhou et al[7]基于参数优化,设置三步阈值,二值化图像后提取瞳孔轮廓,能够较好地解决瞳孔与背景灰度值接近时定位精度下降的问题.El et al[8]提出带变形边缘检测的霍夫圆变换算法检测瞳孔,通过多次滤波处理图像,使用Canny算子检测瞳孔边缘,经过细化去除不满足曲率的边缘,能够较好地去除模糊和噪声对检测精度的影响. ...
非接触眼压计的人眼瞳孔定位算法研究
1
2022
... 形状结构特征和外观纹理特征是瞳孔检测常用的特征,Hough变换是常用的目标检测方法,但准确率有限且运算量大.因此张宏薇等[3]提出改进的Hough变换检测瞳孔,由于设置了检测圆的半径范围,所以在准确率和检测速度方面,比仅利用Hough变换有显著提升,但不同数据集的规格不同,需要人工设置半径范围,算法的自适应性不高,且对图像分辨率要求较高.Gu et al[4]使用轮廓跟踪方法提取瞳孔区域,确定区域质心为瞳孔中心,该方法适用于不规则瞳孔的检测,并且可以满足实时检测的要求,但由于使用固定阈值进行二值化,不能适应光照变化,鲁棒性较差.宋保全等[5]基于亚像素边缘的多模板匹配算法定位瞳孔,提取训练样本图像的亚像素边缘创建匹配模板,使用创建好的模板集合对待测图像进行匹配,该方法不易受个体差异影响,无需人工调参,具有一定的鲁棒性.王鹏等[6]基于近眼红外图像,获取最大连通域后边缘检测,利用改进的最小二乘椭圆拟合定位瞳孔中心,可以解决反射光斑干扰以及瞳孔被部分遮挡的问题.Zhou et al[7]基于参数优化,设置三步阈值,二值化图像后提取瞳孔轮廓,能够较好地解决瞳孔与背景灰度值接近时定位精度下降的问题.El et al[8]提出带变形边缘检测的霍夫圆变换算法检测瞳孔,通过多次滤波处理图像,使用Canny算子检测瞳孔边缘,经过细化去除不满足曲率的边缘,能够较好地去除模糊和噪声对检测精度的影响. ...
Research on pupil location algorithm of non?contact tonometer
1
2022
... 形状结构特征和外观纹理特征是瞳孔检测常用的特征,Hough变换是常用的目标检测方法,但准确率有限且运算量大.因此张宏薇等[3]提出改进的Hough变换检测瞳孔,由于设置了检测圆的半径范围,所以在准确率和检测速度方面,比仅利用Hough变换有显著提升,但不同数据集的规格不同,需要人工设置半径范围,算法的自适应性不高,且对图像分辨率要求较高.Gu et al[4]使用轮廓跟踪方法提取瞳孔区域,确定区域质心为瞳孔中心,该方法适用于不规则瞳孔的检测,并且可以满足实时检测的要求,但由于使用固定阈值进行二值化,不能适应光照变化,鲁棒性较差.宋保全等[5]基于亚像素边缘的多模板匹配算法定位瞳孔,提取训练样本图像的亚像素边缘创建匹配模板,使用创建好的模板集合对待测图像进行匹配,该方法不易受个体差异影响,无需人工调参,具有一定的鲁棒性.王鹏等[6]基于近眼红外图像,获取最大连通域后边缘检测,利用改进的最小二乘椭圆拟合定位瞳孔中心,可以解决反射光斑干扰以及瞳孔被部分遮挡的问题.Zhou et al[7]基于参数优化,设置三步阈值,二值化图像后提取瞳孔轮廓,能够较好地解决瞳孔与背景灰度值接近时定位精度下降的问题.El et al[8]提出带变形边缘检测的霍夫圆变换算法检测瞳孔,通过多次滤波处理图像,使用Canny算子检测瞳孔边缘,经过细化去除不满足曲率的边缘,能够较好地去除模糊和噪声对检测精度的影响. ...
基于近眼红外图像的高精度瞳孔中心定位方法
1
2022
... 形状结构特征和外观纹理特征是瞳孔检测常用的特征,Hough变换是常用的目标检测方法,但准确率有限且运算量大.因此张宏薇等[3]提出改进的Hough变换检测瞳孔,由于设置了检测圆的半径范围,所以在准确率和检测速度方面,比仅利用Hough变换有显著提升,但不同数据集的规格不同,需要人工设置半径范围,算法的自适应性不高,且对图像分辨率要求较高.Gu et al[4]使用轮廓跟踪方法提取瞳孔区域,确定区域质心为瞳孔中心,该方法适用于不规则瞳孔的检测,并且可以满足实时检测的要求,但由于使用固定阈值进行二值化,不能适应光照变化,鲁棒性较差.宋保全等[5]基于亚像素边缘的多模板匹配算法定位瞳孔,提取训练样本图像的亚像素边缘创建匹配模板,使用创建好的模板集合对待测图像进行匹配,该方法不易受个体差异影响,无需人工调参,具有一定的鲁棒性.王鹏等[6]基于近眼红外图像,获取最大连通域后边缘检测,利用改进的最小二乘椭圆拟合定位瞳孔中心,可以解决反射光斑干扰以及瞳孔被部分遮挡的问题.Zhou et al[7]基于参数优化,设置三步阈值,二值化图像后提取瞳孔轮廓,能够较好地解决瞳孔与背景灰度值接近时定位精度下降的问题.El et al[8]提出带变形边缘检测的霍夫圆变换算法检测瞳孔,通过多次滤波处理图像,使用Canny算子检测瞳孔边缘,经过细化去除不满足曲率的边缘,能够较好地去除模糊和噪声对检测精度的影响. ...
High?precision pupil center positioning method based on near?eye infrared image
1
2022
... 形状结构特征和外观纹理特征是瞳孔检测常用的特征,Hough变换是常用的目标检测方法,但准确率有限且运算量大.因此张宏薇等[3]提出改进的Hough变换检测瞳孔,由于设置了检测圆的半径范围,所以在准确率和检测速度方面,比仅利用Hough变换有显著提升,但不同数据集的规格不同,需要人工设置半径范围,算法的自适应性不高,且对图像分辨率要求较高.Gu et al[4]使用轮廓跟踪方法提取瞳孔区域,确定区域质心为瞳孔中心,该方法适用于不规则瞳孔的检测,并且可以满足实时检测的要求,但由于使用固定阈值进行二值化,不能适应光照变化,鲁棒性较差.宋保全等[5]基于亚像素边缘的多模板匹配算法定位瞳孔,提取训练样本图像的亚像素边缘创建匹配模板,使用创建好的模板集合对待测图像进行匹配,该方法不易受个体差异影响,无需人工调参,具有一定的鲁棒性.王鹏等[6]基于近眼红外图像,获取最大连通域后边缘检测,利用改进的最小二乘椭圆拟合定位瞳孔中心,可以解决反射光斑干扰以及瞳孔被部分遮挡的问题.Zhou et al[7]基于参数优化,设置三步阈值,二值化图像后提取瞳孔轮廓,能够较好地解决瞳孔与背景灰度值接近时定位精度下降的问题.El et al[8]提出带变形边缘检测的霍夫圆变换算法检测瞳孔,通过多次滤波处理图像,使用Canny算子检测瞳孔边缘,经过细化去除不满足曲率的边缘,能够较好地去除模糊和噪声对检测精度的影响. ...
A robust pupil localization via a novel parameter optimization strategy
1
2022
... 形状结构特征和外观纹理特征是瞳孔检测常用的特征,Hough变换是常用的目标检测方法,但准确率有限且运算量大.因此张宏薇等[3]提出改进的Hough变换检测瞳孔,由于设置了检测圆的半径范围,所以在准确率和检测速度方面,比仅利用Hough变换有显著提升,但不同数据集的规格不同,需要人工设置半径范围,算法的自适应性不高,且对图像分辨率要求较高.Gu et al[4]使用轮廓跟踪方法提取瞳孔区域,确定区域质心为瞳孔中心,该方法适用于不规则瞳孔的检测,并且可以满足实时检测的要求,但由于使用固定阈值进行二值化,不能适应光照变化,鲁棒性较差.宋保全等[5]基于亚像素边缘的多模板匹配算法定位瞳孔,提取训练样本图像的亚像素边缘创建匹配模板,使用创建好的模板集合对待测图像进行匹配,该方法不易受个体差异影响,无需人工调参,具有一定的鲁棒性.王鹏等[6]基于近眼红外图像,获取最大连通域后边缘检测,利用改进的最小二乘椭圆拟合定位瞳孔中心,可以解决反射光斑干扰以及瞳孔被部分遮挡的问题.Zhou et al[7]基于参数优化,设置三步阈值,二值化图像后提取瞳孔轮廓,能够较好地解决瞳孔与背景灰度值接近时定位精度下降的问题.El et al[8]提出带变形边缘检测的霍夫圆变换算法检测瞳孔,通过多次滤波处理图像,使用Canny算子检测瞳孔边缘,经过细化去除不满足曲率的边缘,能够较好地去除模糊和噪声对检测精度的影响. ...
Robust and high accuracy algorithm for detection of pupil images
1
2022
... 形状结构特征和外观纹理特征是瞳孔检测常用的特征,Hough变换是常用的目标检测方法,但准确率有限且运算量大.因此张宏薇等[3]提出改进的Hough变换检测瞳孔,由于设置了检测圆的半径范围,所以在准确率和检测速度方面,比仅利用Hough变换有显著提升,但不同数据集的规格不同,需要人工设置半径范围,算法的自适应性不高,且对图像分辨率要求较高.Gu et al[4]使用轮廓跟踪方法提取瞳孔区域,确定区域质心为瞳孔中心,该方法适用于不规则瞳孔的检测,并且可以满足实时检测的要求,但由于使用固定阈值进行二值化,不能适应光照变化,鲁棒性较差.宋保全等[5]基于亚像素边缘的多模板匹配算法定位瞳孔,提取训练样本图像的亚像素边缘创建匹配模板,使用创建好的模板集合对待测图像进行匹配,该方法不易受个体差异影响,无需人工调参,具有一定的鲁棒性.王鹏等[6]基于近眼红外图像,获取最大连通域后边缘检测,利用改进的最小二乘椭圆拟合定位瞳孔中心,可以解决反射光斑干扰以及瞳孔被部分遮挡的问题.Zhou et al[7]基于参数优化,设置三步阈值,二值化图像后提取瞳孔轮廓,能够较好地解决瞳孔与背景灰度值接近时定位精度下降的问题.El et al[8]提出带变形边缘检测的霍夫圆变换算法检测瞳孔,通过多次滤波处理图像,使用Canny算子检测瞳孔边缘,经过细化去除不满足曲率的边缘,能够较好地去除模糊和噪声对检测精度的影响. ...
Pupil localisation and eye centre estimation using machine learning and computer vision
1
2020
... 目前主流的瞳孔检测方法是基于深度学习的方法,Khan et al[9]提出一种深度学习和图像处理算法相结合的瞳孔定位方法,通过深度神经网络获取眼部图像,在眼图上利用多级卷积来找到所识别的眼眶内瞳孔的最佳水平和垂直坐标.崔家礼等[10]基于卷积神经网络,在网络结构中减少下采样因子,增加扩张残差单元,实现复杂场景下的直接人眼检测.Gdoura et al[11]结合了卷积神经网络和类似马尔可夫随机场的过程,提出一种轻量级的混合模型,能够在相同的卷积层上运行不同的图像尺度,在性能提高的基础上,显著降低模型大小.尽管使用大量标记瞳孔中心的样本进行训练可以获得较好的结果,但是此类方法训练耗时,且高质量的数据集有限.此外,深度学习模型在实际应用中涉及模型部署,要解决模型框架兼容性差,所需的环境难以配置的问题,以及深度学习模型的结构通常比较庞大,需要大量的算力才能满足实时运行的需求,模型的运行效率需要优化的问题. ...
一种复杂场景下的人眼检测算法
1
2021
... 目前主流的瞳孔检测方法是基于深度学习的方法,Khan et al[9]提出一种深度学习和图像处理算法相结合的瞳孔定位方法,通过深度神经网络获取眼部图像,在眼图上利用多级卷积来找到所识别的眼眶内瞳孔的最佳水平和垂直坐标.崔家礼等[10]基于卷积神经网络,在网络结构中减少下采样因子,增加扩张残差单元,实现复杂场景下的直接人眼检测.Gdoura et al[11]结合了卷积神经网络和类似马尔可夫随机场的过程,提出一种轻量级的混合模型,能够在相同的卷积层上运行不同的图像尺度,在性能提高的基础上,显著降低模型大小.尽管使用大量标记瞳孔中心的样本进行训练可以获得较好的结果,但是此类方法训练耗时,且高质量的数据集有限.此外,深度学习模型在实际应用中涉及模型部署,要解决模型框架兼容性差,所需的环境难以配置的问题,以及深度学习模型的结构通常比较庞大,需要大量的算力才能满足实时运行的需求,模型的运行效率需要优化的问题. ...
A human eye detection algorithm in complex scenarios
1
2021
... 目前主流的瞳孔检测方法是基于深度学习的方法,Khan et al[9]提出一种深度学习和图像处理算法相结合的瞳孔定位方法,通过深度神经网络获取眼部图像,在眼图上利用多级卷积来找到所识别的眼眶内瞳孔的最佳水平和垂直坐标.崔家礼等[10]基于卷积神经网络,在网络结构中减少下采样因子,增加扩张残差单元,实现复杂场景下的直接人眼检测.Gdoura et al[11]结合了卷积神经网络和类似马尔可夫随机场的过程,提出一种轻量级的混合模型,能够在相同的卷积层上运行不同的图像尺度,在性能提高的基础上,显著降低模型大小.尽管使用大量标记瞳孔中心的样本进行训练可以获得较好的结果,但是此类方法训练耗时,且高质量的数据集有限.此外,深度学习模型在实际应用中涉及模型部署,要解决模型框架兼容性差,所需的环境难以配置的问题,以及深度学习模型的结构通常比较庞大,需要大量的算力才能满足实时运行的需求,模型的运行效率需要优化的问题. ...
Combining CNNs and Markov?like models for facial landmark detection with spatial consistency estimates
1
2023
... 目前主流的瞳孔检测方法是基于深度学习的方法,Khan et al[9]提出一种深度学习和图像处理算法相结合的瞳孔定位方法,通过深度神经网络获取眼部图像,在眼图上利用多级卷积来找到所识别的眼眶内瞳孔的最佳水平和垂直坐标.崔家礼等[10]基于卷积神经网络,在网络结构中减少下采样因子,增加扩张残差单元,实现复杂场景下的直接人眼检测.Gdoura et al[11]结合了卷积神经网络和类似马尔可夫随机场的过程,提出一种轻量级的混合模型,能够在相同的卷积层上运行不同的图像尺度,在性能提高的基础上,显著降低模型大小.尽管使用大量标记瞳孔中心的样本进行训练可以获得较好的结果,但是此类方法训练耗时,且高质量的数据集有限.此外,深度学习模型在实际应用中涉及模型部署,要解决模型框架兼容性差,所需的环境难以配置的问题,以及深度学习模型的结构通常比较庞大,需要大量的算力才能满足实时运行的需求,模型的运行效率需要优化的问题. ...










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}