激光遥感
1
1984
... 激光雷达探测是一种主动式遥感观测技术,其原理为向目标物发射激光,通过测量激光回波信号的属性来获取目标物的属性.激光具有单色性好、相干性强、方向性强以及高功率、高分辨率等优良特性[1],这使得激光雷达在大气探测中拥有独特的优势,可以对云、气溶胶、大气成分和风等目标进行大尺度、多模式的全天候连续观测[2],自出现起便被各个领域所重视与应用. ...
大气气溶胶污染监测中应用的新型全天时户外型拉曼?米散射激光雷达系统
1
2019
... 激光雷达探测是一种主动式遥感观测技术,其原理为向目标物发射激光,通过测量激光回波信号的属性来获取目标物的属性.激光具有单色性好、相干性强、方向性强以及高功率、高分辨率等优良特性[1],这使得激光雷达在大气探测中拥有独特的优势,可以对云、气溶胶、大气成分和风等目标进行大尺度、多模式的全天候连续观测[2],自出现起便被各个领域所重视与应用. ...
New all?weather outdoor Raman?Mie scattering lidar system used in atmospheric aerosol pollution monitoring
1
2019
... 激光雷达探测是一种主动式遥感观测技术,其原理为向目标物发射激光,通过测量激光回波信号的属性来获取目标物的属性.激光具有单色性好、相干性强、方向性强以及高功率、高分辨率等优良特性[1],这使得激光雷达在大气探测中拥有独特的优势,可以对云、气溶胶、大气成分和风等目标进行大尺度、多模式的全天候连续观测[2],自出现起便被各个领域所重视与应用. ...
Detection of scattering layers in the upper atmosphere (60~140 km) by optical radar
1
1963
... 大气探测激光雷达的发展可追溯至20世纪60年代.1963年,世界首台红宝石米散射激光雷达诞生于美国[3],我国随之也开展了一系列激光大气探测研究.早期的激光雷达通常体积庞大且操作复杂.随着技术水平的提高,激光雷达越来越向着小型化、多功能化的方向发展,所搭载的平台也由地基平台扩展至空基、天基(星载)平台.随着大气探测激光雷达数量的增多,越来越多的激光雷达以组网的形式加入了地球大气的综合观测.美国国家航空航天局(National Aeronautics and Space Administration,NASA)以测量气溶胶和云的垂直结构及边界层高度为目标,建设了以微脉冲米散射激光雷达为主的微脉冲激光雷达网络MPLNET (the NASA Micro Pulse Lidar Network)[4];日本建设了以偏振激光雷达为主的东亚沙尘观测激光雷达网AD⁃net (the Asian Dust and Aerosol Lidar Observation Network)用于对亚洲沙尘进行观测[5-6];我国也建成了“一带一路”激光雷达网等多个联网激光雷达探测系统. ...
Status of the NASA Micro Pulse Lidar Network (MPLNET): Overview of the network and future plans,new version 3 data products,and the polarized MPL
1
2018
... 大气探测激光雷达的发展可追溯至20世纪60年代.1963年,世界首台红宝石米散射激光雷达诞生于美国[3],我国随之也开展了一系列激光大气探测研究.早期的激光雷达通常体积庞大且操作复杂.随着技术水平的提高,激光雷达越来越向着小型化、多功能化的方向发展,所搭载的平台也由地基平台扩展至空基、天基(星载)平台.随着大气探测激光雷达数量的增多,越来越多的激光雷达以组网的形式加入了地球大气的综合观测.美国国家航空航天局(National Aeronautics and Space Administration,NASA)以测量气溶胶和云的垂直结构及边界层高度为目标,建设了以微脉冲米散射激光雷达为主的微脉冲激光雷达网络MPLNET (the NASA Micro Pulse Lidar Network)[4];日本建设了以偏振激光雷达为主的东亚沙尘观测激光雷达网AD⁃net (the Asian Dust and Aerosol Lidar Observation Network)用于对亚洲沙尘进行观测[5-6];我国也建成了“一带一路”激光雷达网等多个联网激光雷达探测系统. ...
1
2018
... 大气探测激光雷达的发展可追溯至20世纪60年代.1963年,世界首台红宝石米散射激光雷达诞生于美国[3],我国随之也开展了一系列激光大气探测研究.早期的激光雷达通常体积庞大且操作复杂.随着技术水平的提高,激光雷达越来越向着小型化、多功能化的方向发展,所搭载的平台也由地基平台扩展至空基、天基(星载)平台.随着大气探测激光雷达数量的增多,越来越多的激光雷达以组网的形式加入了地球大气的综合观测.美国国家航空航天局(National Aeronautics and Space Administration,NASA)以测量气溶胶和云的垂直结构及边界层高度为目标,建设了以微脉冲米散射激光雷达为主的微脉冲激光雷达网络MPLNET (the NASA Micro Pulse Lidar Network)[4];日本建设了以偏振激光雷达为主的东亚沙尘观测激光雷达网AD⁃net (the Asian Dust and Aerosol Lidar Observation Network)用于对亚洲沙尘进行观测[5-6];我国也建成了“一带一路”激光雷达网等多个联网激光雷达探测系统. ...
Ground?based network observation of Asian dust events of April 1998 in east Asia
1
2001
... 大气探测激光雷达的发展可追溯至20世纪60年代.1963年,世界首台红宝石米散射激光雷达诞生于美国[3],我国随之也开展了一系列激光大气探测研究.早期的激光雷达通常体积庞大且操作复杂.随着技术水平的提高,激光雷达越来越向着小型化、多功能化的方向发展,所搭载的平台也由地基平台扩展至空基、天基(星载)平台.随着大气探测激光雷达数量的增多,越来越多的激光雷达以组网的形式加入了地球大气的综合观测.美国国家航空航天局(National Aeronautics and Space Administration,NASA)以测量气溶胶和云的垂直结构及边界层高度为目标,建设了以微脉冲米散射激光雷达为主的微脉冲激光雷达网络MPLNET (the NASA Micro Pulse Lidar Network)[4];日本建设了以偏振激光雷达为主的东亚沙尘观测激光雷达网AD⁃net (the Asian Dust and Aerosol Lidar Observation Network)用于对亚洲沙尘进行观测[5-6];我国也建成了“一带一路”激光雷达网等多个联网激光雷达探测系统. ...
气象激光雷达的发展现状
3
2006
... 由于激光雷达种类繁多,各类激光雷达之间存在显著差异,过去的综述文献常常会对激光雷达进行分类介绍.例如,王青梅和张以谟[7]介绍了半导体激光雷达、微脉冲激光雷达、弹性散射激光雷达、多普勒激光雷达、差分吸收激光雷达以及拉曼激光雷达等六种激光雷达的发展现状和趋势;田晓敏等[8]介绍了米散射激光雷达、偏振激光雷达、拉曼激光雷达、差分吸收激光雷达、高光谱分辨率激光雷达、瑞利散射激光雷达、共振荧光激光雷达和多普勒激光雷达等八种不同探测技术的激光雷达;黄忠伟等[9]介绍了米散射激光雷达、偏振激光雷达、拉曼激光雷达、高光谱分辨率激光雷达、荧光激光雷达、沙式激光雷达、CCD激光雷达和LED光源雷达等八种气溶胶激光雷达.显然,不同文献介绍激光雷达时使用的分类方法和标准并不相同. ...
... 二氧化碳(CO2)是大气的重要组成成分,它的持续增加也是气候变化的主要原因之一.在主动探测领域,一般使用双波长或多波长的差分吸收激光雷达来测量CO2的分布情况,而拉曼激光雷达也可以用来测量CO2的浓度.主要用来测量CO2的激光雷达可以被称为二氧化碳激光雷达.值得注意的是,使用CO2作为激光器工作介质的激光雷达有时候也被称为二氧化碳激光雷达[7],在实际交流中需要进行区分. ...
... 激光器的工作介质可以是气体、固体或半导体,因此有文献根据激光器的工作介质对激光雷达进行命名[7].可以根据激光器工作物质的不同将激光雷达分为气体激光雷达、固体激光雷达和半导体激光雷达,此外我们将LED光学雷达也列入此分类. ...
Development of meteorological lidar
3
2006
... 由于激光雷达种类繁多,各类激光雷达之间存在显著差异,过去的综述文献常常会对激光雷达进行分类介绍.例如,王青梅和张以谟[7]介绍了半导体激光雷达、微脉冲激光雷达、弹性散射激光雷达、多普勒激光雷达、差分吸收激光雷达以及拉曼激光雷达等六种激光雷达的发展现状和趋势;田晓敏等[8]介绍了米散射激光雷达、偏振激光雷达、拉曼激光雷达、差分吸收激光雷达、高光谱分辨率激光雷达、瑞利散射激光雷达、共振荧光激光雷达和多普勒激光雷达等八种不同探测技术的激光雷达;黄忠伟等[9]介绍了米散射激光雷达、偏振激光雷达、拉曼激光雷达、高光谱分辨率激光雷达、荧光激光雷达、沙式激光雷达、CCD激光雷达和LED光源雷达等八种气溶胶激光雷达.显然,不同文献介绍激光雷达时使用的分类方法和标准并不相同. ...
... 二氧化碳(CO2)是大气的重要组成成分,它的持续增加也是气候变化的主要原因之一.在主动探测领域,一般使用双波长或多波长的差分吸收激光雷达来测量CO2的分布情况,而拉曼激光雷达也可以用来测量CO2的浓度.主要用来测量CO2的激光雷达可以被称为二氧化碳激光雷达.值得注意的是,使用CO2作为激光器工作介质的激光雷达有时候也被称为二氧化碳激光雷达[7],在实际交流中需要进行区分. ...
... 激光器的工作介质可以是气体、固体或半导体,因此有文献根据激光器的工作介质对激光雷达进行命名[7].可以根据激光器工作物质的不同将激光雷达分为气体激光雷达、固体激光雷达和半导体激光雷达,此外我们将LED光学雷达也列入此分类. ...
大气探测激光雷达技术综述
2
2018
... 由于激光雷达种类繁多,各类激光雷达之间存在显著差异,过去的综述文献常常会对激光雷达进行分类介绍.例如,王青梅和张以谟[7]介绍了半导体激光雷达、微脉冲激光雷达、弹性散射激光雷达、多普勒激光雷达、差分吸收激光雷达以及拉曼激光雷达等六种激光雷达的发展现状和趋势;田晓敏等[8]介绍了米散射激光雷达、偏振激光雷达、拉曼激光雷达、差分吸收激光雷达、高光谱分辨率激光雷达、瑞利散射激光雷达、共振荧光激光雷达和多普勒激光雷达等八种不同探测技术的激光雷达;黄忠伟等[9]介绍了米散射激光雷达、偏振激光雷达、拉曼激光雷达、高光谱分辨率激光雷达、荧光激光雷达、沙式激光雷达、CCD激光雷达和LED光源雷达等八种气溶胶激光雷达.显然,不同文献介绍激光雷达时使用的分类方法和标准并不相同. ...
... 所有弹性散射激光雷达都能探测到大气粒子的米散射和空气分子的瑞利散射,但在实际应用中,往往将主要用于探测低空粒子米散射信号的弹性散射激光雷达称为米散射激光雷达[8],而将主要通过瑞利散射信号来反演高空温湿廓线的弹性散射激光雷达称为瑞利散射激光雷达[16-17],此外高光谱激光雷达也属于弹性散射激光雷达. ...
Review of lidar tech?nology for atmosphere monitoring
2
2018
... 由于激光雷达种类繁多,各类激光雷达之间存在显著差异,过去的综述文献常常会对激光雷达进行分类介绍.例如,王青梅和张以谟[7]介绍了半导体激光雷达、微脉冲激光雷达、弹性散射激光雷达、多普勒激光雷达、差分吸收激光雷达以及拉曼激光雷达等六种激光雷达的发展现状和趋势;田晓敏等[8]介绍了米散射激光雷达、偏振激光雷达、拉曼激光雷达、差分吸收激光雷达、高光谱分辨率激光雷达、瑞利散射激光雷达、共振荧光激光雷达和多普勒激光雷达等八种不同探测技术的激光雷达;黄忠伟等[9]介绍了米散射激光雷达、偏振激光雷达、拉曼激光雷达、高光谱分辨率激光雷达、荧光激光雷达、沙式激光雷达、CCD激光雷达和LED光源雷达等八种气溶胶激光雷达.显然,不同文献介绍激光雷达时使用的分类方法和标准并不相同. ...
... 所有弹性散射激光雷达都能探测到大气粒子的米散射和空气分子的瑞利散射,但在实际应用中,往往将主要用于探测低空粒子米散射信号的弹性散射激光雷达称为米散射激光雷达[8],而将主要通过瑞利散射信号来反演高空温湿廓线的弹性散射激光雷达称为瑞利散射激光雷达[16-17],此外高光谱激光雷达也属于弹性散射激光雷达. ...
气溶胶激光雷达的国内外研究进展与展望
1
2022
... 由于激光雷达种类繁多,各类激光雷达之间存在显著差异,过去的综述文献常常会对激光雷达进行分类介绍.例如,王青梅和张以谟[7]介绍了半导体激光雷达、微脉冲激光雷达、弹性散射激光雷达、多普勒激光雷达、差分吸收激光雷达以及拉曼激光雷达等六种激光雷达的发展现状和趋势;田晓敏等[8]介绍了米散射激光雷达、偏振激光雷达、拉曼激光雷达、差分吸收激光雷达、高光谱分辨率激光雷达、瑞利散射激光雷达、共振荧光激光雷达和多普勒激光雷达等八种不同探测技术的激光雷达;黄忠伟等[9]介绍了米散射激光雷达、偏振激光雷达、拉曼激光雷达、高光谱分辨率激光雷达、荧光激光雷达、沙式激光雷达、CCD激光雷达和LED光源雷达等八种气溶胶激光雷达.显然,不同文献介绍激光雷达时使用的分类方法和标准并不相同. ...
An overview of aerosol lidar:Progress and prospect
1
2022
... 由于激光雷达种类繁多,各类激光雷达之间存在显著差异,过去的综述文献常常会对激光雷达进行分类介绍.例如,王青梅和张以谟[7]介绍了半导体激光雷达、微脉冲激光雷达、弹性散射激光雷达、多普勒激光雷达、差分吸收激光雷达以及拉曼激光雷达等六种激光雷达的发展现状和趋势;田晓敏等[8]介绍了米散射激光雷达、偏振激光雷达、拉曼激光雷达、差分吸收激光雷达、高光谱分辨率激光雷达、瑞利散射激光雷达、共振荧光激光雷达和多普勒激光雷达等八种不同探测技术的激光雷达;黄忠伟等[9]介绍了米散射激光雷达、偏振激光雷达、拉曼激光雷达、高光谱分辨率激光雷达、荧光激光雷达、沙式激光雷达、CCD激光雷达和LED光源雷达等八种气溶胶激光雷达.显然,不同文献介绍激光雷达时使用的分类方法和标准并不相同. ...
Design of a high?spectral?resolution lidar for atmospheric temperature measurement down to the near ground
2
2019
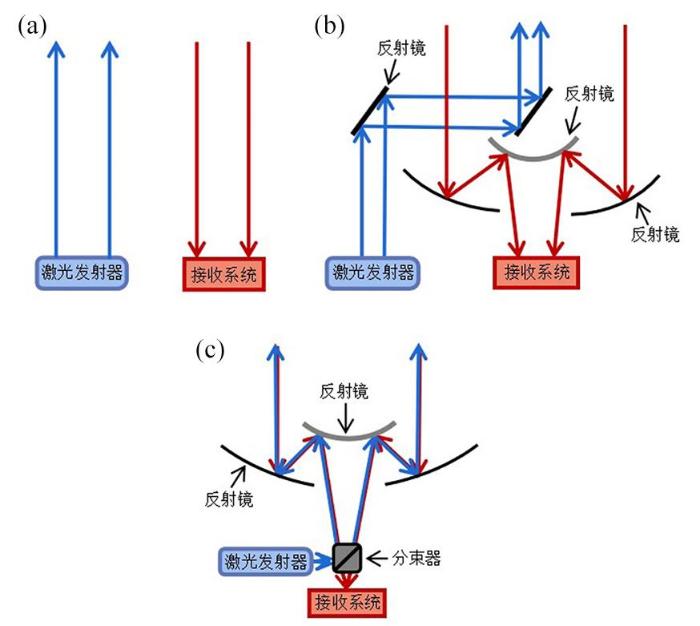
... 后向散射激光雷达观测到的信号不一定是正后向散射光,其观测信号对应的散射角与接收装置的结构有关.采用异轴结构和同轴异路径结构[10]的后向散射激光雷达(图1a和图1b),其观测信号所对应的散射角会略微偏离180°的后向散射角,这使得观测信号基本不会受到粒子多次散射所产生的相干后向增强效应的影响,但它依然会受到大粒子单次散射的后向散射相干增强效应的影响[11].图1c中的激光和回波的路径有一部分完全重合,能够直接探测正后向散射信号,其回波会受到各种后向散射相干增强效应的影响.由于异轴结构和同轴同路径结构激光雷达在探测湍流的相干后向散射时存在巨大差异,Banakh and Razenkov[12]设计了一个包含同路径和异路径光路的激光雷达,用来进行湍流的相干后向散射研究. ...
... 高光谱分辨率激光雷达(High Spectral Resolution Lidar,HSRL)是一种以精细分光技术为核心的激光雷达,能够以很高的光谱分辨率来测量回波信号[10,27-28].尽管HSRL测量的回波以弹性散射光为主,但它能够探测到瑞利⁃布里渊散射所产生的频变,所以一般不被归类于弹性散射激光雷达.由于大气分子的热运动速度方差较大,而云与气溶胶粒子的运动速度方差较小,分子散射与粒子散射的光谱存在巨大差异,故HSRL可以将分子散射与粒子散射区分开来.HSRL探测系统的关键技术之一是光谱滤光器,可以分为原子分子吸收型和干涉型两大类,其中原子分子吸收型光谱滤光器根据原子和分子的特征吸收谱线来过滤气溶胶的散射回波信号,但缺陷在于只能局限于几个固定的波长[25,29],而干涉型光谱滤光器的工作原理为光学干涉相长相消原理,可以通过对特定波长信号的抑制来分离分子和气溶胶的散射信号[30].为了更好地分离大气分子与气溶胶的散射信号,HSRL对激光器、光谱滤光器等都有较高的要求[30].当通过分子散射信号获得了大气的消光信息后,由于分子的后向散射系数可以通过理论计算直接获得,结合粒子散射信号就可以计算得出后向散射系数,无须再对激光雷达比进行假设.不过,HSRL也存在由于在反演中对空气密度廓线进行假设而导致的不确定性[31]. ...
Coherent backscatter enhancement in single scattering
1
2018
... 后向散射激光雷达观测到的信号不一定是正后向散射光,其观测信号对应的散射角与接收装置的结构有关.采用异轴结构和同轴异路径结构[10]的后向散射激光雷达(图1a和图1b),其观测信号所对应的散射角会略微偏离180°的后向散射角,这使得观测信号基本不会受到粒子多次散射所产生的相干后向增强效应的影响,但它依然会受到大粒子单次散射的后向散射相干增强效应的影响[11].图1c中的激光和回波的路径有一部分完全重合,能够直接探测正后向散射信号,其回波会受到各种后向散射相干增强效应的影响.由于异轴结构和同轴同路径结构激光雷达在探测湍流的相干后向散射时存在巨大差异,Banakh and Razenkov[12]设计了一个包含同路径和异路径光路的激光雷达,用来进行湍流的相干后向散射研究. ...
Refractive turbulence strength estimation based on the laser echo signal amplification effect
1
2016
... 后向散射激光雷达观测到的信号不一定是正后向散射光,其观测信号对应的散射角与接收装置的结构有关.采用异轴结构和同轴异路径结构[10]的后向散射激光雷达(图1a和图1b),其观测信号所对应的散射角会略微偏离180°的后向散射角,这使得观测信号基本不会受到粒子多次散射所产生的相干后向增强效应的影响,但它依然会受到大粒子单次散射的后向散射相干增强效应的影响[11].图1c中的激光和回波的路径有一部分完全重合,能够直接探测正后向散射信号,其回波会受到各种后向散射相干增强效应的影响.由于异轴结构和同轴同路径结构激光雷达在探测湍流的相干后向散射时存在巨大差异,Banakh and Razenkov[12]设计了一个包含同路径和异路径光路的激光雷达,用来进行湍流的相干后向散射研究. ...
Geometrical form factor in the laser radar equation: An experimental determination
1
1979
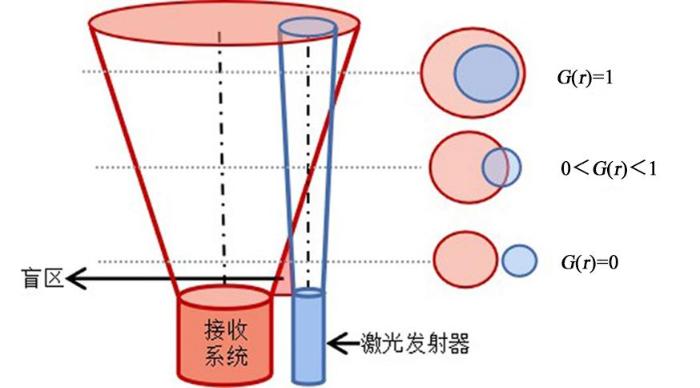
... 对于异轴和同轴异路径后向散射激光雷达,由于激光束与视场的不完全重合(图2),大量近场回波信号无法被激光雷达传感器完全接收,而远场的回波则大部分处于视场的范围之内,因此需要使用重叠函数(几何校正因子)来描述激光束与视场之间的几何关系对激光雷达回波信号的影响[13].重叠函数是距离的函数,在临近区域趋近于0,而在远场趋近于恒定值.因此,重叠函数可以定义为在距离r处传感器所接收到的回波强度与到达激光雷达接收面的回波强度的比例,除以远场传感器所接收到的回波强度与到达激光雷达接收面的回波强度的比例.对于异轴和同轴异路径激光雷达,邻近区域的重叠函数为0,因此会形成一个盲区(图2);随着距离的增加,重叠函数的值增加,但在回波信号强度小于后脉冲噪声的过渡区域,依然无法有效地进行遥感反演,严重影响地基激光雷达对近地面的探测.同路径激光雷达则在理论上没有近场盲区. ...
Atmospheric aerosol profiling with a bistatic imaging lidar system
1
2007
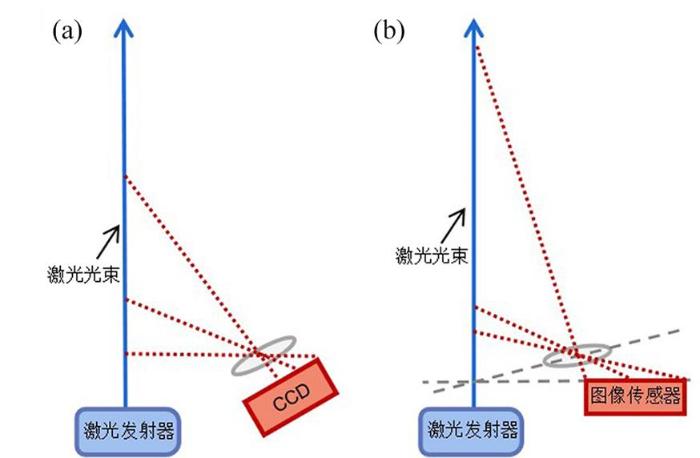
... 侧向成像激光雷达[14]是一种成本较低的激光雷达,其工作原理为使用成像系统对激光束进行拍照,计算每个像素所对应的回波传播方向,并通过传播方向和激光束的几何信息计算像素点所对应的距离. ...
沙氏大气激光雷达技术及其研究进展
1
2018
... 另一种被称为沙氏激光雷达[15],采用沙氏成像系统进行成像(图3b),其遥感原理与CCD成像激光雷达类似,但激光、透镜组与传感器之间的几何关系与CCD成像激光雷达不一样,其相邻像素所对应的目标物间距不会随着距离的增加而急剧降低.和CCD成像激光雷达相比,沙氏激光雷达的接收系统与发射系统之间的距离较近,因此可以固定在同一个底座上,方便进行扫描观测.但是,受到激光束发散的影响,其有效测距精度依然会随着距离的增加而急剧降低. ...
Atmospheric scheimpflug lidar technique and its progress
1
2018
... 另一种被称为沙氏激光雷达[15],采用沙氏成像系统进行成像(图3b),其遥感原理与CCD成像激光雷达类似,但激光、透镜组与传感器之间的几何关系与CCD成像激光雷达不一样,其相邻像素所对应的目标物间距不会随着距离的增加而急剧降低.和CCD成像激光雷达相比,沙氏激光雷达的接收系统与发射系统之间的距离较近,因此可以固定在同一个底座上,方便进行扫描观测.但是,受到激光束发散的影响,其有效测距精度依然会随着距离的增加而急剧降低. ...
紫外差分吸收激光雷达测量平流层臭氧
2
1998
... 所有弹性散射激光雷达都能探测到大气粒子的米散射和空气分子的瑞利散射,但在实际应用中,往往将主要用于探测低空粒子米散射信号的弹性散射激光雷达称为米散射激光雷达[8],而将主要通过瑞利散射信号来反演高空温湿廓线的弹性散射激光雷达称为瑞利散射激光雷达[16-17],此外高光谱激光雷达也属于弹性散射激光雷达. ...
... 早在20世纪就已经有了臭氧激光雷达的相关应用,中国科学院安徽光学精密机械研究所就于1998年研制了一台紫外差分吸收(Ultraviolet Differential Absorption Lidar,UV⁃DIAL)激光雷达,用于18~45 km平流层臭氧垂直廓线的长期监测[16].而今,臭氧激光雷达被越来越多地应用于大气污染物监测中,做出了重要贡献. ...
UV?dial system for measurements of stratospheric ozone
2
1998
... 所有弹性散射激光雷达都能探测到大气粒子的米散射和空气分子的瑞利散射,但在实际应用中,往往将主要用于探测低空粒子米散射信号的弹性散射激光雷达称为米散射激光雷达[8],而将主要通过瑞利散射信号来反演高空温湿廓线的弹性散射激光雷达称为瑞利散射激光雷达[16-17],此外高光谱激光雷达也属于弹性散射激光雷达. ...
... 早在20世纪就已经有了臭氧激光雷达的相关应用,中国科学院安徽光学精密机械研究所就于1998年研制了一台紫外差分吸收(Ultraviolet Differential Absorption Lidar,UV⁃DIAL)激光雷达,用于18~45 km平流层臭氧垂直廓线的长期监测[16].而今,臭氧激光雷达被越来越多地应用于大气污染物监测中,做出了重要贡献. ...
用瑞利散射激光雷达探测平流层中上部温度
1
2001
... 所有弹性散射激光雷达都能探测到大气粒子的米散射和空气分子的瑞利散射,但在实际应用中,往往将主要用于探测低空粒子米散射信号的弹性散射激光雷达称为米散射激光雷达[8],而将主要通过瑞利散射信号来反演高空温湿廓线的弹性散射激光雷达称为瑞利散射激光雷达[16-17],此外高光谱激光雷达也属于弹性散射激光雷达. ...
Temperature measurement with rayleigh scattering lidar in the mid and upper stratosphere
1
2001
... 所有弹性散射激光雷达都能探测到大气粒子的米散射和空气分子的瑞利散射,但在实际应用中,往往将主要用于探测低空粒子米散射信号的弹性散射激光雷达称为米散射激光雷达[8],而将主要通过瑞利散射信号来反演高空温湿廓线的弹性散射激光雷达称为瑞利散射激光雷达[16-17],此外高光谱激光雷达也属于弹性散射激光雷达. ...
Analysis of atmospheric lidar observations: some comments
1
1984
... 当使用弹性散射激光雷达探测气溶胶时需要求解激光雷达方程,然而每一个高度的大气所对应的消光系数和后向散射系数都是未知的,这使得方程组没有唯一解.因此,当使用单线弹性散射激光雷达观测资料进行反演时,一般需要根据统计经验预设消光系数和后向散射系数之间的数学关系(例如预设激光雷达比,即消光系数与后向散射系数的比值),并使用高空干洁大气的瑞利散射信号强度作为定标依据,然后用半解析方法(常用Klett法和Fernald法)[18-19]或者结合更复杂的数值方法对激光雷达方程求解.同时,使用弹性散射激光雷达反演云的特性时也需要预设多次散射系数,这也会带来误差. ...
Lidar inversion with variable backscatter/extinction ratios
1
1985
... 当使用弹性散射激光雷达探测气溶胶时需要求解激光雷达方程,然而每一个高度的大气所对应的消光系数和后向散射系数都是未知的,这使得方程组没有唯一解.因此,当使用单线弹性散射激光雷达观测资料进行反演时,一般需要根据统计经验预设消光系数和后向散射系数之间的数学关系(例如预设激光雷达比,即消光系数与后向散射系数的比值),并使用高空干洁大气的瑞利散射信号强度作为定标依据,然后用半解析方法(常用Klett法和Fernald法)[18-19]或者结合更复杂的数值方法对激光雷达方程求解.同时,使用弹性散射激光雷达反演云的特性时也需要预设多次散射系数,这也会带来误差. ...
Multi?wavelength lidar for ozone measurements in the troposphere and the lower stratosphere
1
1990
... 差分吸收激光雷达是一种用来测量特定气体浓度的激光雷达,它会向目标空间同时发射两束波长相近但气体吸收率不同的激光束,并测量这两束光对应的回波强度.通过测量这两束激光回波信号强度的差值变化,就可以得到特定气体的空间分布特征[20].由于两束激光处于同一光路且波长相近,待测物质对两束激光有着相同的影响,相互抵消误差可以大大提高激光雷达的抗干扰特性[21]. ...
激光雷达技术在大气环境监测中的应用
1
2018
... 差分吸收激光雷达是一种用来测量特定气体浓度的激光雷达,它会向目标空间同时发射两束波长相近但气体吸收率不同的激光束,并测量这两束光对应的回波强度.通过测量这两束激光回波信号强度的差值变化,就可以得到特定气体的空间分布特征[20].由于两束激光处于同一光路且波长相近,待测物质对两束激光有着相同的影响,相互抵消误差可以大大提高激光雷达的抗干扰特性[21]. ...
Application of lidar technology in atmospheric environment monitoring
1
2018
... 差分吸收激光雷达是一种用来测量特定气体浓度的激光雷达,它会向目标空间同时发射两束波长相近但气体吸收率不同的激光束,并测量这两束光对应的回波强度.通过测量这两束激光回波信号强度的差值变化,就可以得到特定气体的空间分布特征[20].由于两束激光处于同一光路且波长相近,待测物质对两束激光有着相同的影响,相互抵消误差可以大大提高激光雷达的抗干扰特性[21]. ...
Measurement of atmospheric aerosol extinction profiles with a Raman lidar
1
1990
... 常见的拉曼激光雷达拥有振动⁃转动拉曼通道,一般发射355(532) nm的激光,同时测量弹性散射、氮气拉曼散射388(607) nm和水汽拉曼散射411(660) nm的强度[22].由于氮气的含量是固定不变的,因此可以根据氮气拉曼散射的强度来获得大气的消光信息,并通过氮气拉曼散射和弹性散射的强度直接获得粒子的后向散射系数.它还能结合大气的消光信息和水汽拉曼散射的强度直接反演水汽浓度. ...
Combined Raman lidar for the measurement of atmospheric temperature,water vapor,particle extinction coefficient,and particle backscatter coefficient
1
2002
... 拥有纯转动拉曼散射通道的拉曼激光雷达还能够测量大气的温度.不同频率的纯转动拉曼散射强度与温度之间的函数存在差异,因此可以通过纯转动拉曼散射强度进行温度的反演.Behrendt et al[23]利用拉曼激光雷达系统的两个纯转动拉曼通道实现了对大气温度的测量,同时还测量了气溶胶消光系数、后向散射系数、湿度等参数;谭敏等[24]使用多功能拉曼激光雷达同时测量了大气温度、水汽混合比的垂直分布及大气气溶胶光学性质,实现了对流层大气参数的实时测量. ...
基于拉曼激光雷达的大气温度和水汽反演分析
1
2020
... 拥有纯转动拉曼散射通道的拉曼激光雷达还能够测量大气的温度.不同频率的纯转动拉曼散射强度与温度之间的函数存在差异,因此可以通过纯转动拉曼散射强度进行温度的反演.Behrendt et al[23]利用拉曼激光雷达系统的两个纯转动拉曼通道实现了对大气温度的测量,同时还测量了气溶胶消光系数、后向散射系数、湿度等参数;谭敏等[24]使用多功能拉曼激光雷达同时测量了大气温度、水汽混合比的垂直分布及大气气溶胶光学性质,实现了对流层大气参数的实时测量. ...
Study on atmospheric temperature and water?vapor mixing ratio based on Raman lidar
1
2020
... 拥有纯转动拉曼散射通道的拉曼激光雷达还能够测量大气的温度.不同频率的纯转动拉曼散射强度与温度之间的函数存在差异,因此可以通过纯转动拉曼散射强度进行温度的反演.Behrendt et al[23]利用拉曼激光雷达系统的两个纯转动拉曼通道实现了对大气温度的测量,同时还测量了气溶胶消光系数、后向散射系数、湿度等参数;谭敏等[24]使用多功能拉曼激光雷达同时测量了大气温度、水汽混合比的垂直分布及大气气溶胶光学性质,实现了对流层大气参数的实时测量. ...
大气遥感高光谱分辨率激光雷达研究进展
3
2015
... 和普通弹性散射激光雷达相比,拉曼激光雷达的精度更高,功能更全面,但其成本和对仪器的要求也都更高.由于拉曼散射的能量远低于弹性散射能量,受背景噪声影响大[25],如果接收系统的口径较小或者滤波片的带宽不够窄,那么在白天观测效果会很差;此外,在反演气溶胶消光系数时需要对气溶胶消光系数的波长依赖性进行假设,这也可能导致误差;另一个可能的系统误差来源于对大气密度廓线的假设[26]. ...
... 高光谱分辨率激光雷达(High Spectral Resolution Lidar,HSRL)是一种以精细分光技术为核心的激光雷达,能够以很高的光谱分辨率来测量回波信号[10,27-28].尽管HSRL测量的回波以弹性散射光为主,但它能够探测到瑞利⁃布里渊散射所产生的频变,所以一般不被归类于弹性散射激光雷达.由于大气分子的热运动速度方差较大,而云与气溶胶粒子的运动速度方差较小,分子散射与粒子散射的光谱存在巨大差异,故HSRL可以将分子散射与粒子散射区分开来.HSRL探测系统的关键技术之一是光谱滤光器,可以分为原子分子吸收型和干涉型两大类,其中原子分子吸收型光谱滤光器根据原子和分子的特征吸收谱线来过滤气溶胶的散射回波信号,但缺陷在于只能局限于几个固定的波长[25,29],而干涉型光谱滤光器的工作原理为光学干涉相长相消原理,可以通过对特定波长信号的抑制来分离分子和气溶胶的散射信号[30].为了更好地分离大气分子与气溶胶的散射信号,HSRL对激光器、光谱滤光器等都有较高的要求[30].当通过分子散射信号获得了大气的消光信息后,由于分子的后向散射系数可以通过理论计算直接获得,结合粒子散射信号就可以计算得出后向散射系数,无须再对激光雷达比进行假设.不过,HSRL也存在由于在反演中对空气密度廓线进行假设而导致的不确定性[31]. ...
... 多普勒测风激光雷达可分为相干探测与直接探测两种,在前面的章节中已有详细论述.HSRL可以用于测风,属于直接探测[25].相干探测多普勒激光雷达具有高灵敏度、高信噪比、易于集成的特点,应用领域更广[37],与直接探测多普勒激光雷达相比,其激光发射功率更低,然而当气溶胶浓度很低时,在中高空中就很难获得风速信息.目前,星载测风激光雷达也在稳步发展中.欧洲空间局(European Space Agency,ESA)研制的全球首颗星载激光测风卫星Aeolus已于2018年成功升空,其上搭载的激光雷达采用直接探测技术,分别通过瑞利通道和米通道进行大气风场的探测[55-56],美国和日本也相继研制了自己的星载测风激光雷达技术体制来对高空风场数据进行补充[57]. ...
High spectral resolution lidar for atmosphere remote sensing:A review
3
2015
... 和普通弹性散射激光雷达相比,拉曼激光雷达的精度更高,功能更全面,但其成本和对仪器的要求也都更高.由于拉曼散射的能量远低于弹性散射能量,受背景噪声影响大[25],如果接收系统的口径较小或者滤波片的带宽不够窄,那么在白天观测效果会很差;此外,在反演气溶胶消光系数时需要对气溶胶消光系数的波长依赖性进行假设,这也可能导致误差;另一个可能的系统误差来源于对大气密度廓线的假设[26]. ...
... 高光谱分辨率激光雷达(High Spectral Resolution Lidar,HSRL)是一种以精细分光技术为核心的激光雷达,能够以很高的光谱分辨率来测量回波信号[10,27-28].尽管HSRL测量的回波以弹性散射光为主,但它能够探测到瑞利⁃布里渊散射所产生的频变,所以一般不被归类于弹性散射激光雷达.由于大气分子的热运动速度方差较大,而云与气溶胶粒子的运动速度方差较小,分子散射与粒子散射的光谱存在巨大差异,故HSRL可以将分子散射与粒子散射区分开来.HSRL探测系统的关键技术之一是光谱滤光器,可以分为原子分子吸收型和干涉型两大类,其中原子分子吸收型光谱滤光器根据原子和分子的特征吸收谱线来过滤气溶胶的散射回波信号,但缺陷在于只能局限于几个固定的波长[25,29],而干涉型光谱滤光器的工作原理为光学干涉相长相消原理,可以通过对特定波长信号的抑制来分离分子和气溶胶的散射信号[30].为了更好地分离大气分子与气溶胶的散射信号,HSRL对激光器、光谱滤光器等都有较高的要求[30].当通过分子散射信号获得了大气的消光信息后,由于分子的后向散射系数可以通过理论计算直接获得,结合粒子散射信号就可以计算得出后向散射系数,无须再对激光雷达比进行假设.不过,HSRL也存在由于在反演中对空气密度廓线进行假设而导致的不确定性[31]. ...
... 多普勒测风激光雷达可分为相干探测与直接探测两种,在前面的章节中已有详细论述.HSRL可以用于测风,属于直接探测[25].相干探测多普勒激光雷达具有高灵敏度、高信噪比、易于集成的特点,应用领域更广[37],与直接探测多普勒激光雷达相比,其激光发射功率更低,然而当气溶胶浓度很低时,在中高空中就很难获得风速信息.目前,星载测风激光雷达也在稳步发展中.欧洲空间局(European Space Agency,ESA)研制的全球首颗星载激光测风卫星Aeolus已于2018年成功升空,其上搭载的激光雷达采用直接探测技术,分别通过瑞利通道和米通道进行大气风场的探测[55-56],美国和日本也相继研制了自己的星载测风激光雷达技术体制来对高空风场数据进行补充[57]. ...
Lidar measurements for desert dust characterization: An overview
1
2012
... 和普通弹性散射激光雷达相比,拉曼激光雷达的精度更高,功能更全面,但其成本和对仪器的要求也都更高.由于拉曼散射的能量远低于弹性散射能量,受背景噪声影响大[25],如果接收系统的口径较小或者滤波片的带宽不够窄,那么在白天观测效果会很差;此外,在反演气溶胶消光系数时需要对气溶胶消光系数的波长依赖性进行假设,这也可能导致误差;另一个可能的系统误差来源于对大气密度廓线的假设[26]. ...
Performance estimation of space?borne high?spectral?resolution lidar for cloud and aerosol optical properties at 532 nm
1
2019
... 高光谱分辨率激光雷达(High Spectral Resolution Lidar,HSRL)是一种以精细分光技术为核心的激光雷达,能够以很高的光谱分辨率来测量回波信号[10,27-28].尽管HSRL测量的回波以弹性散射光为主,但它能够探测到瑞利⁃布里渊散射所产生的频变,所以一般不被归类于弹性散射激光雷达.由于大气分子的热运动速度方差较大,而云与气溶胶粒子的运动速度方差较小,分子散射与粒子散射的光谱存在巨大差异,故HSRL可以将分子散射与粒子散射区分开来.HSRL探测系统的关键技术之一是光谱滤光器,可以分为原子分子吸收型和干涉型两大类,其中原子分子吸收型光谱滤光器根据原子和分子的特征吸收谱线来过滤气溶胶的散射回波信号,但缺陷在于只能局限于几个固定的波长[25,29],而干涉型光谱滤光器的工作原理为光学干涉相长相消原理,可以通过对特定波长信号的抑制来分离分子和气溶胶的散射信号[30].为了更好地分离大气分子与气溶胶的散射信号,HSRL对激光器、光谱滤光器等都有较高的要求[30].当通过分子散射信号获得了大气的消光信息后,由于分子的后向散射系数可以通过理论计算直接获得,结合粒子散射信号就可以计算得出后向散射系数,无须再对激光雷达比进行假设.不过,HSRL也存在由于在反演中对空气密度廓线进行假设而导致的不确定性[31]. ...
1
2017
... 高光谱分辨率激光雷达(High Spectral Resolution Lidar,HSRL)是一种以精细分光技术为核心的激光雷达,能够以很高的光谱分辨率来测量回波信号[10,27-28].尽管HSRL测量的回波以弹性散射光为主,但它能够探测到瑞利⁃布里渊散射所产生的频变,所以一般不被归类于弹性散射激光雷达.由于大气分子的热运动速度方差较大,而云与气溶胶粒子的运动速度方差较小,分子散射与粒子散射的光谱存在巨大差异,故HSRL可以将分子散射与粒子散射区分开来.HSRL探测系统的关键技术之一是光谱滤光器,可以分为原子分子吸收型和干涉型两大类,其中原子分子吸收型光谱滤光器根据原子和分子的特征吸收谱线来过滤气溶胶的散射回波信号,但缺陷在于只能局限于几个固定的波长[25,29],而干涉型光谱滤光器的工作原理为光学干涉相长相消原理,可以通过对特定波长信号的抑制来分离分子和气溶胶的散射信号[30].为了更好地分离大气分子与气溶胶的散射信号,HSRL对激光器、光谱滤光器等都有较高的要求[30].当通过分子散射信号获得了大气的消光信息后,由于分子的后向散射系数可以通过理论计算直接获得,结合粒子散射信号就可以计算得出后向散射系数,无须再对激光雷达比进行假设.不过,HSRL也存在由于在反演中对空气密度廓线进行假设而导致的不确定性[31]. ...
1
2017
... 高光谱分辨率激光雷达(High Spectral Resolution Lidar,HSRL)是一种以精细分光技术为核心的激光雷达,能够以很高的光谱分辨率来测量回波信号[10,27-28].尽管HSRL测量的回波以弹性散射光为主,但它能够探测到瑞利⁃布里渊散射所产生的频变,所以一般不被归类于弹性散射激光雷达.由于大气分子的热运动速度方差较大,而云与气溶胶粒子的运动速度方差较小,分子散射与粒子散射的光谱存在巨大差异,故HSRL可以将分子散射与粒子散射区分开来.HSRL探测系统的关键技术之一是光谱滤光器,可以分为原子分子吸收型和干涉型两大类,其中原子分子吸收型光谱滤光器根据原子和分子的特征吸收谱线来过滤气溶胶的散射回波信号,但缺陷在于只能局限于几个固定的波长[25,29],而干涉型光谱滤光器的工作原理为光学干涉相长相消原理,可以通过对特定波长信号的抑制来分离分子和气溶胶的散射信号[30].为了更好地分离大气分子与气溶胶的散射信号,HSRL对激光器、光谱滤光器等都有较高的要求[30].当通过分子散射信号获得了大气的消光信息后,由于分子的后向散射系数可以通过理论计算直接获得,结合粒子散射信号就可以计算得出后向散射系数,无须再对激光雷达比进行假设.不过,HSRL也存在由于在反演中对空气密度廓线进行假设而导致的不确定性[31]. ...
Development of the ZJU polarized near?infrared high spectral resolution lidar
1
2013
... 高光谱分辨率激光雷达(High Spectral Resolution Lidar,HSRL)是一种以精细分光技术为核心的激光雷达,能够以很高的光谱分辨率来测量回波信号[10,27-28].尽管HSRL测量的回波以弹性散射光为主,但它能够探测到瑞利⁃布里渊散射所产生的频变,所以一般不被归类于弹性散射激光雷达.由于大气分子的热运动速度方差较大,而云与气溶胶粒子的运动速度方差较小,分子散射与粒子散射的光谱存在巨大差异,故HSRL可以将分子散射与粒子散射区分开来.HSRL探测系统的关键技术之一是光谱滤光器,可以分为原子分子吸收型和干涉型两大类,其中原子分子吸收型光谱滤光器根据原子和分子的特征吸收谱线来过滤气溶胶的散射回波信号,但缺陷在于只能局限于几个固定的波长[25,29],而干涉型光谱滤光器的工作原理为光学干涉相长相消原理,可以通过对特定波长信号的抑制来分离分子和气溶胶的散射信号[30].为了更好地分离大气分子与气溶胶的散射信号,HSRL对激光器、光谱滤光器等都有较高的要求[30].当通过分子散射信号获得了大气的消光信息后,由于分子的后向散射系数可以通过理论计算直接获得,结合粒子散射信号就可以计算得出后向散射系数,无须再对激光雷达比进行假设.不过,HSRL也存在由于在反演中对空气密度廓线进行假设而导致的不确定性[31]. ...
近红外高光谱分辨率激光雷达光谱滤光器性能分析
2
2016
... 高光谱分辨率激光雷达(High Spectral Resolution Lidar,HSRL)是一种以精细分光技术为核心的激光雷达,能够以很高的光谱分辨率来测量回波信号[10,27-28].尽管HSRL测量的回波以弹性散射光为主,但它能够探测到瑞利⁃布里渊散射所产生的频变,所以一般不被归类于弹性散射激光雷达.由于大气分子的热运动速度方差较大,而云与气溶胶粒子的运动速度方差较小,分子散射与粒子散射的光谱存在巨大差异,故HSRL可以将分子散射与粒子散射区分开来.HSRL探测系统的关键技术之一是光谱滤光器,可以分为原子分子吸收型和干涉型两大类,其中原子分子吸收型光谱滤光器根据原子和分子的特征吸收谱线来过滤气溶胶的散射回波信号,但缺陷在于只能局限于几个固定的波长[25,29],而干涉型光谱滤光器的工作原理为光学干涉相长相消原理,可以通过对特定波长信号的抑制来分离分子和气溶胶的散射信号[30].为了更好地分离大气分子与气溶胶的散射信号,HSRL对激光器、光谱滤光器等都有较高的要求[30].当通过分子散射信号获得了大气的消光信息后,由于分子的后向散射系数可以通过理论计算直接获得,结合粒子散射信号就可以计算得出后向散射系数,无须再对激光雷达比进行假设.不过,HSRL也存在由于在反演中对空气密度廓线进行假设而导致的不确定性[31]. ...
... [30].当通过分子散射信号获得了大气的消光信息后,由于分子的后向散射系数可以通过理论计算直接获得,结合粒子散射信号就可以计算得出后向散射系数,无须再对激光雷达比进行假设.不过,HSRL也存在由于在反演中对空气密度廓线进行假设而导致的不确定性[31]. ...
Spectrum filter performance analysis on near?infrared high spectral?resolution lidar
2
2016
... 高光谱分辨率激光雷达(High Spectral Resolution Lidar,HSRL)是一种以精细分光技术为核心的激光雷达,能够以很高的光谱分辨率来测量回波信号[10,27-28].尽管HSRL测量的回波以弹性散射光为主,但它能够探测到瑞利⁃布里渊散射所产生的频变,所以一般不被归类于弹性散射激光雷达.由于大气分子的热运动速度方差较大,而云与气溶胶粒子的运动速度方差较小,分子散射与粒子散射的光谱存在巨大差异,故HSRL可以将分子散射与粒子散射区分开来.HSRL探测系统的关键技术之一是光谱滤光器,可以分为原子分子吸收型和干涉型两大类,其中原子分子吸收型光谱滤光器根据原子和分子的特征吸收谱线来过滤气溶胶的散射回波信号,但缺陷在于只能局限于几个固定的波长[25,29],而干涉型光谱滤光器的工作原理为光学干涉相长相消原理,可以通过对特定波长信号的抑制来分离分子和气溶胶的散射信号[30].为了更好地分离大气分子与气溶胶的散射信号,HSRL对激光器、光谱滤光器等都有较高的要求[30].当通过分子散射信号获得了大气的消光信息后,由于分子的后向散射系数可以通过理论计算直接获得,结合粒子散射信号就可以计算得出后向散射系数,无须再对激光雷达比进行假设.不过,HSRL也存在由于在反演中对空气密度廓线进行假设而导致的不确定性[31]. ...
... [30].当通过分子散射信号获得了大气的消光信息后,由于分子的后向散射系数可以通过理论计算直接获得,结合粒子散射信号就可以计算得出后向散射系数,无须再对激光雷达比进行假设.不过,HSRL也存在由于在反演中对空气密度廓线进行假设而导致的不确定性[31]. ...
Airborne high spectral resolution lidar for profiling aerosol optical properties
1
2008
... 高光谱分辨率激光雷达(High Spectral Resolution Lidar,HSRL)是一种以精细分光技术为核心的激光雷达,能够以很高的光谱分辨率来测量回波信号[10,27-28].尽管HSRL测量的回波以弹性散射光为主,但它能够探测到瑞利⁃布里渊散射所产生的频变,所以一般不被归类于弹性散射激光雷达.由于大气分子的热运动速度方差较大,而云与气溶胶粒子的运动速度方差较小,分子散射与粒子散射的光谱存在巨大差异,故HSRL可以将分子散射与粒子散射区分开来.HSRL探测系统的关键技术之一是光谱滤光器,可以分为原子分子吸收型和干涉型两大类,其中原子分子吸收型光谱滤光器根据原子和分子的特征吸收谱线来过滤气溶胶的散射回波信号,但缺陷在于只能局限于几个固定的波长[25,29],而干涉型光谱滤光器的工作原理为光学干涉相长相消原理,可以通过对特定波长信号的抑制来分离分子和气溶胶的散射信号[30].为了更好地分离大气分子与气溶胶的散射信号,HSRL对激光器、光谱滤光器等都有较高的要求[30].当通过分子散射信号获得了大气的消光信息后,由于分子的后向散射系数可以通过理论计算直接获得,结合粒子散射信号就可以计算得出后向散射系数,无须再对激光雷达比进行假设.不过,HSRL也存在由于在反演中对空气密度廓线进行假设而导致的不确定性[31]. ...
大气气溶胶光学参数的高光谱分辨率激光雷达探测研究
1
2008
... HSRL的精度比一般弹性散射激光雷达的精度更高,用途也更广泛,已经在多个领域取得了成果[32-34],但在地面的应用中仍是拉曼激光雷达使用更为广泛. ...
A Research of High spectral resolution lidar detecting atmospheric aerosol optical parameters
1
2008
... HSRL的精度比一般弹性散射激光雷达的精度更高,用途也更广泛,已经在多个领域取得了成果[32-34],但在地面的应用中仍是拉曼激光雷达使用更为广泛. ...
The NASA langley airborne high spectral resolution lidar for measurements of aerosols and clouds
0
2006
Japan
1
2006
... HSRL的精度比一般弹性散射激光雷达的精度更高,用途也更广泛,已经在多个领域取得了成果[32-34],但在地面的应用中仍是拉曼激光雷达使用更为广泛. ...
相干多普勒激光测风雷达系统研究
2
2010
... 相干探测多普勒激光雷达通过光学混频的方式实现对多普勒频移的测量.它在向大气发射激光的同时也会向接收系统发射本振光信号,发射的激光经过声光调制器调制后产生频移并在激光放大器中进行放大后输出.放大输出的激光一部分与大气进行相互作用并产生散射信号,散射信号会与本振光信号进行混频得到回波信号;另一部分输出激光则被分光器单独分出,并与声光调制后的光信号进行混频得到参考信号,接收到的回波信号与参考信号进行混频后再通过数字信号处理就能获得风场信息[35-36].相干多普勒激光雷达灵敏度高、信噪比高、易于集成、应用领域更广[37].而直接探测多普勒激光雷达则通过测量发射能量与接收能量之间发生的频移来实现对风速的测量[38-39]. ...
... 风是重要的大气要素,在研究中一般使用多普勒测风激光雷达来测量气溶胶或空气分子的径向多普勒速度,再据此计算风速和风向.由于常常将气溶胶的移动等效于风的移动,故大气中气溶胶层越厚,反演得到的风场数据精度越高[35]. ...
Index system of coherence Doppler wind lidar
2
2010
... 相干探测多普勒激光雷达通过光学混频的方式实现对多普勒频移的测量.它在向大气发射激光的同时也会向接收系统发射本振光信号,发射的激光经过声光调制器调制后产生频移并在激光放大器中进行放大后输出.放大输出的激光一部分与大气进行相互作用并产生散射信号,散射信号会与本振光信号进行混频得到回波信号;另一部分输出激光则被分光器单独分出,并与声光调制后的光信号进行混频得到参考信号,接收到的回波信号与参考信号进行混频后再通过数字信号处理就能获得风场信息[35-36].相干多普勒激光雷达灵敏度高、信噪比高、易于集成、应用领域更广[37].而直接探测多普勒激光雷达则通过测量发射能量与接收能量之间发生的频移来实现对风速的测量[38-39]. ...
... 风是重要的大气要素,在研究中一般使用多普勒测风激光雷达来测量气溶胶或空气分子的径向多普勒速度,再据此计算风速和风向.由于常常将气溶胶的移动等效于风的移动,故大气中气溶胶层越厚,反演得到的风场数据精度越高[35]. ...
激光多普勒测风技术最新进展
1
2019
... 相干探测多普勒激光雷达通过光学混频的方式实现对多普勒频移的测量.它在向大气发射激光的同时也会向接收系统发射本振光信号,发射的激光经过声光调制器调制后产生频移并在激光放大器中进行放大后输出.放大输出的激光一部分与大气进行相互作用并产生散射信号,散射信号会与本振光信号进行混频得到回波信号;另一部分输出激光则被分光器单独分出,并与声光调制后的光信号进行混频得到参考信号,接收到的回波信号与参考信号进行混频后再通过数字信号处理就能获得风场信息[35-36].相干多普勒激光雷达灵敏度高、信噪比高、易于集成、应用领域更广[37].而直接探测多普勒激光雷达则通过测量发射能量与接收能量之间发生的频移来实现对风速的测量[38-39]. ...
Latest development of laser Doppler wind measurement technology
1
2019
... 相干探测多普勒激光雷达通过光学混频的方式实现对多普勒频移的测量.它在向大气发射激光的同时也会向接收系统发射本振光信号,发射的激光经过声光调制器调制后产生频移并在激光放大器中进行放大后输出.放大输出的激光一部分与大气进行相互作用并产生散射信号,散射信号会与本振光信号进行混频得到回波信号;另一部分输出激光则被分光器单独分出,并与声光调制后的光信号进行混频得到参考信号,接收到的回波信号与参考信号进行混频后再通过数字信号处理就能获得风场信息[35-36].相干多普勒激光雷达灵敏度高、信噪比高、易于集成、应用领域更广[37].而直接探测多普勒激光雷达则通过测量发射能量与接收能量之间发生的频移来实现对风速的测量[38-39]. ...
多普勒测风激光雷达三波束反演方法与实验
2
2020
... 相干探测多普勒激光雷达通过光学混频的方式实现对多普勒频移的测量.它在向大气发射激光的同时也会向接收系统发射本振光信号,发射的激光经过声光调制器调制后产生频移并在激光放大器中进行放大后输出.放大输出的激光一部分与大气进行相互作用并产生散射信号,散射信号会与本振光信号进行混频得到回波信号;另一部分输出激光则被分光器单独分出,并与声光调制后的光信号进行混频得到参考信号,接收到的回波信号与参考信号进行混频后再通过数字信号处理就能获得风场信息[35-36].相干多普勒激光雷达灵敏度高、信噪比高、易于集成、应用领域更广[37].而直接探测多普勒激光雷达则通过测量发射能量与接收能量之间发生的频移来实现对风速的测量[38-39]. ...
... 多普勒测风激光雷达可分为相干探测与直接探测两种,在前面的章节中已有详细论述.HSRL可以用于测风,属于直接探测[25].相干探测多普勒激光雷达具有高灵敏度、高信噪比、易于集成的特点,应用领域更广[37],与直接探测多普勒激光雷达相比,其激光发射功率更低,然而当气溶胶浓度很低时,在中高空中就很难获得风速信息.目前,星载测风激光雷达也在稳步发展中.欧洲空间局(European Space Agency,ESA)研制的全球首颗星载激光测风卫星Aeolus已于2018年成功升空,其上搭载的激光雷达采用直接探测技术,分别通过瑞利通道和米通道进行大气风场的探测[55-56],美国和日本也相继研制了自己的星载测风激光雷达技术体制来对高空风场数据进行补充[57]. ...
Three?beam methodology and observations of wind profiling with Doppler lidar
2
2020
... 相干探测多普勒激光雷达通过光学混频的方式实现对多普勒频移的测量.它在向大气发射激光的同时也会向接收系统发射本振光信号,发射的激光经过声光调制器调制后产生频移并在激光放大器中进行放大后输出.放大输出的激光一部分与大气进行相互作用并产生散射信号,散射信号会与本振光信号进行混频得到回波信号;另一部分输出激光则被分光器单独分出,并与声光调制后的光信号进行混频得到参考信号,接收到的回波信号与参考信号进行混频后再通过数字信号处理就能获得风场信息[35-36].相干多普勒激光雷达灵敏度高、信噪比高、易于集成、应用领域更广[37].而直接探测多普勒激光雷达则通过测量发射能量与接收能量之间发生的频移来实现对风速的测量[38-39]. ...
... 多普勒测风激光雷达可分为相干探测与直接探测两种,在前面的章节中已有详细论述.HSRL可以用于测风,属于直接探测[25].相干探测多普勒激光雷达具有高灵敏度、高信噪比、易于集成的特点,应用领域更广[37],与直接探测多普勒激光雷达相比,其激光发射功率更低,然而当气溶胶浓度很低时,在中高空中就很难获得风速信息.目前,星载测风激光雷达也在稳步发展中.欧洲空间局(European Space Agency,ESA)研制的全球首颗星载激光测风卫星Aeolus已于2018年成功升空,其上搭载的激光雷达采用直接探测技术,分别通过瑞利通道和米通道进行大气风场的探测[55-56],美国和日本也相继研制了自己的星载测风激光雷达技术体制来对高空风场数据进行补充[57]. ...
Direct detection doppler wind lidar: Ground?based operation to space
1
2003
... 相干探测多普勒激光雷达通过光学混频的方式实现对多普勒频移的测量.它在向大气发射激光的同时也会向接收系统发射本振光信号,发射的激光经过声光调制器调制后产生频移并在激光放大器中进行放大后输出.放大输出的激光一部分与大气进行相互作用并产生散射信号,散射信号会与本振光信号进行混频得到回波信号;另一部分输出激光则被分光器单独分出,并与声光调制后的光信号进行混频得到参考信号,接收到的回波信号与参考信号进行混频后再通过数字信号处理就能获得风场信息[35-36].相干多普勒激光雷达灵敏度高、信噪比高、易于集成、应用领域更广[37].而直接探测多普勒激光雷达则通过测量发射能量与接收能量之间发生的频移来实现对风速的测量[38-39]. ...
相干多普勒测风激光雷达
1
2009
... 相干探测多普勒激光雷达通过光学混频的方式实现对多普勒频移的测量.它在向大气发射激光的同时也会向接收系统发射本振光信号,发射的激光经过声光调制器调制后产生频移并在激光放大器中进行放大后输出.放大输出的激光一部分与大气进行相互作用并产生散射信号,散射信号会与本振光信号进行混频得到回波信号;另一部分输出激光则被分光器单独分出,并与声光调制后的光信号进行混频得到参考信号,接收到的回波信号与参考信号进行混频后再通过数字信号处理就能获得风场信息[35-36].相干多普勒激光雷达灵敏度高、信噪比高、易于集成、应用领域更广[37].而直接探测多普勒激光雷达则通过测量发射能量与接收能量之间发生的频移来实现对风速的测量[38-39]. ...
Coherent Doppler wind lidar
1
2009
... 相干探测多普勒激光雷达通过光学混频的方式实现对多普勒频移的测量.它在向大气发射激光的同时也会向接收系统发射本振光信号,发射的激光经过声光调制器调制后产生频移并在激光放大器中进行放大后输出.放大输出的激光一部分与大气进行相互作用并产生散射信号,散射信号会与本振光信号进行混频得到回波信号;另一部分输出激光则被分光器单独分出,并与声光调制后的光信号进行混频得到参考信号,接收到的回波信号与参考信号进行混频后再通过数字信号处理就能获得风场信息[35-36].相干多普勒激光雷达灵敏度高、信噪比高、易于集成、应用领域更广[37].而直接探测多普勒激光雷达则通过测量发射能量与接收能量之间发生的频移来实现对风速的测量[38-39]. ...
荧光激光雷达技术探测水面油污染系统仿真研究
1
2016
... 荧光激光雷达工作原理为用激光对物质进行照射后,生物气溶胶常常可以产生荧光,非生物气溶胶则一般不能,由此可以区分生物气溶胶与非生物气溶胶.不同生物气溶胶会产生不同的荧光光谱,据此可以对混合生物气溶胶进行预分类,具有高灵敏度、测量速度快的特点,且无需接触就可进行在线测量,在环境监测及污染防治等领域有一定优越性[40].不过在实际应用中,荧光光谱强度会受到温压、pH、激光能量及气溶胶浓度等的影响,且荧光激光雷达信噪比低[41]. ...
Simulation of fluorescence lidar for detecting oil slick
1
2016
... 荧光激光雷达工作原理为用激光对物质进行照射后,生物气溶胶常常可以产生荧光,非生物气溶胶则一般不能,由此可以区分生物气溶胶与非生物气溶胶.不同生物气溶胶会产生不同的荧光光谱,据此可以对混合生物气溶胶进行预分类,具有高灵敏度、测量速度快的特点,且无需接触就可进行在线测量,在环境监测及污染防治等领域有一定优越性[40].不过在实际应用中,荧光光谱强度会受到温压、pH、激光能量及气溶胶浓度等的影响,且荧光激光雷达信噪比低[41]. ...
1
2018
... 荧光激光雷达工作原理为用激光对物质进行照射后,生物气溶胶常常可以产生荧光,非生物气溶胶则一般不能,由此可以区分生物气溶胶与非生物气溶胶.不同生物气溶胶会产生不同的荧光光谱,据此可以对混合生物气溶胶进行预分类,具有高灵敏度、测量速度快的特点,且无需接触就可进行在线测量,在环境监测及污染防治等领域有一定优越性[40].不过在实际应用中,荧光光谱强度会受到温压、pH、激光能量及气溶胶浓度等的影响,且荧光激光雷达信噪比低[41]. ...
1
2018
... 荧光激光雷达工作原理为用激光对物质进行照射后,生物气溶胶常常可以产生荧光,非生物气溶胶则一般不能,由此可以区分生物气溶胶与非生物气溶胶.不同生物气溶胶会产生不同的荧光光谱,据此可以对混合生物气溶胶进行预分类,具有高灵敏度、测量速度快的特点,且无需接触就可进行在线测量,在环境监测及污染防治等领域有一定优越性[40].不过在实际应用中,荧光光谱强度会受到温压、pH、激光能量及气溶胶浓度等的影响,且荧光激光雷达信噪比低[41]. ...
Ceilometer lidar comparison:Backscatter coefficient retrieval and signal?to?noise ratio determination
1
2010
... 激光云高仪(以下简称云高仪)是一种主要用来进行云高测量的后向散射激光雷达[42].云高仪属于简易的后向散射弹性激光雷达,能量一般较低,成本也低于大部分其他类型的后向散射激光雷达,并且稳定性高,因此应用非常广泛.除了实现云高的测量外,云高仪还可用来获得边界层高度和大气粒子的垂直分布特征,其资料可以用于大气污染物的研究中,但是对气溶胶的反演精度较低.并且,在雨雪天,由于云高仪的发射波长往往接近近红外水汽吸收带,仪器会受到水汽的干扰,最终对反演结果产生影响[43-44]. ...
基于激光云高仪反演全天边界层高度的两步曲线拟合法
1
2020
... 激光云高仪(以下简称云高仪)是一种主要用来进行云高测量的后向散射激光雷达[42].云高仪属于简易的后向散射弹性激光雷达,能量一般较低,成本也低于大部分其他类型的后向散射激光雷达,并且稳定性高,因此应用非常广泛.除了实现云高的测量外,云高仪还可用来获得边界层高度和大气粒子的垂直分布特征,其资料可以用于大气污染物的研究中,但是对气溶胶的反演精度较低.并且,在雨雪天,由于云高仪的发射波长往往接近近红外水汽吸收带,仪器会受到水汽的干扰,最终对反演结果产生影响[43-44]. ...
A two?step ideal curve fitting method for retrieving full?day planetary boundary layer height based on ceilometer data
1
2020
... 激光云高仪(以下简称云高仪)是一种主要用来进行云高测量的后向散射激光雷达[42].云高仪属于简易的后向散射弹性激光雷达,能量一般较低,成本也低于大部分其他类型的后向散射激光雷达,并且稳定性高,因此应用非常广泛.除了实现云高的测量外,云高仪还可用来获得边界层高度和大气粒子的垂直分布特征,其资料可以用于大气污染物的研究中,但是对气溶胶的反演精度较低.并且,在雨雪天,由于云高仪的发射波长往往接近近红外水汽吸收带,仪器会受到水汽的干扰,最终对反演结果产生影响[43-44]. ...
Examination of possible synergy between lidar and ceilometer for the monitoring of atmospheric aerosols
1
2011
... 激光云高仪(以下简称云高仪)是一种主要用来进行云高测量的后向散射激光雷达[42].云高仪属于简易的后向散射弹性激光雷达,能量一般较低,成本也低于大部分其他类型的后向散射激光雷达,并且稳定性高,因此应用非常广泛.除了实现云高的测量外,云高仪还可用来获得边界层高度和大气粒子的垂直分布特征,其资料可以用于大气污染物的研究中,但是对气溶胶的反演精度较低.并且,在雨雪天,由于云高仪的发射波长往往接近近红外水汽吸收带,仪器会受到水汽的干扰,最终对反演结果产生影响[43-44]. ...
米?拉曼散射激光雷达反演对流层气溶胶消光系数廓线
1
2017
... 云和气溶胶激光雷达的探测目标是云和气溶胶.常见的多通道弹性散射激光雷达、拉曼激光雷达、高光谱激光雷达等都可以作为云和气溶胶激光雷达进行探测工作.米⁃瑞利散射激光雷达在气溶胶和云的探测中比较常见,因为大气中与激光发生米散射的主要就是气溶胶与云,它可以通过探测由大气分子产生的瑞利散射和由气溶胶产生的米散射的混合光谱信号得到气溶胶的时空变化特征[45-46].由美国NASA和法国国家空间研究中心合作研发的红外探路者卫星(Cloud⁃Aerosol Lidar and Infrared Path nder Satellite Observation,CALIPSO)上携带的正交极化激光雷达(the Cloud⁃Aerosol Lidar with Orthogonal Polarization,CALIOP)是当前应用最为广泛的云与气溶胶激光雷达之一,其上的1064 nm通道和532 nm通道可以对云和气溶胶进行探测,并提供云与气溶胶的垂直信息[47],不过它的使用也不仅仅局限于这一种目的.例如通过CALIPSO观测得到的气溶胶数据,结合其他数据,最终可以反演地面能见度,提供能见度的空间信息[48]. ...
Inversion of Tropospheric Aerosol Extinction Coefficient Profile by Mie?Raman Scattering Lidar
1
2017
... 云和气溶胶激光雷达的探测目标是云和气溶胶.常见的多通道弹性散射激光雷达、拉曼激光雷达、高光谱激光雷达等都可以作为云和气溶胶激光雷达进行探测工作.米⁃瑞利散射激光雷达在气溶胶和云的探测中比较常见,因为大气中与激光发生米散射的主要就是气溶胶与云,它可以通过探测由大气分子产生的瑞利散射和由气溶胶产生的米散射的混合光谱信号得到气溶胶的时空变化特征[45-46].由美国NASA和法国国家空间研究中心合作研发的红外探路者卫星(Cloud⁃Aerosol Lidar and Infrared Path nder Satellite Observation,CALIPSO)上携带的正交极化激光雷达(the Cloud⁃Aerosol Lidar with Orthogonal Polarization,CALIOP)是当前应用最为广泛的云与气溶胶激光雷达之一,其上的1064 nm通道和532 nm通道可以对云和气溶胶进行探测,并提供云与气溶胶的垂直信息[47],不过它的使用也不仅仅局限于这一种目的.例如通过CALIPSO观测得到的气溶胶数据,结合其他数据,最终可以反演地面能见度,提供能见度的空间信息[48]. ...
双扫描激光雷达精细探测低层大气气溶胶方法
1
2017
... 云和气溶胶激光雷达的探测目标是云和气溶胶.常见的多通道弹性散射激光雷达、拉曼激光雷达、高光谱激光雷达等都可以作为云和气溶胶激光雷达进行探测工作.米⁃瑞利散射激光雷达在气溶胶和云的探测中比较常见,因为大气中与激光发生米散射的主要就是气溶胶与云,它可以通过探测由大气分子产生的瑞利散射和由气溶胶产生的米散射的混合光谱信号得到气溶胶的时空变化特征[45-46].由美国NASA和法国国家空间研究中心合作研发的红外探路者卫星(Cloud⁃Aerosol Lidar and Infrared Path nder Satellite Observation,CALIPSO)上携带的正交极化激光雷达(the Cloud⁃Aerosol Lidar with Orthogonal Polarization,CALIOP)是当前应用最为广泛的云与气溶胶激光雷达之一,其上的1064 nm通道和532 nm通道可以对云和气溶胶进行探测,并提供云与气溶胶的垂直信息[47],不过它的使用也不仅仅局限于这一种目的.例如通过CALIPSO观测得到的气溶胶数据,结合其他数据,最终可以反演地面能见度,提供能见度的空间信息[48]. ...
Fine detection of aerosol in the lower troposphere using twin scanning lidars
1
2017
... 云和气溶胶激光雷达的探测目标是云和气溶胶.常见的多通道弹性散射激光雷达、拉曼激光雷达、高光谱激光雷达等都可以作为云和气溶胶激光雷达进行探测工作.米⁃瑞利散射激光雷达在气溶胶和云的探测中比较常见,因为大气中与激光发生米散射的主要就是气溶胶与云,它可以通过探测由大气分子产生的瑞利散射和由气溶胶产生的米散射的混合光谱信号得到气溶胶的时空变化特征[45-46].由美国NASA和法国国家空间研究中心合作研发的红外探路者卫星(Cloud⁃Aerosol Lidar and Infrared Path nder Satellite Observation,CALIPSO)上携带的正交极化激光雷达(the Cloud⁃Aerosol Lidar with Orthogonal Polarization,CALIOP)是当前应用最为广泛的云与气溶胶激光雷达之一,其上的1064 nm通道和532 nm通道可以对云和气溶胶进行探测,并提供云与气溶胶的垂直信息[47],不过它的使用也不仅仅局限于这一种目的.例如通过CALIPSO观测得到的气溶胶数据,结合其他数据,最终可以反演地面能见度,提供能见度的空间信息[48]. ...
CALIPSO mission:Spaceborne lidar for observation of aerosols and clouds
1
2003
... 云和气溶胶激光雷达的探测目标是云和气溶胶.常见的多通道弹性散射激光雷达、拉曼激光雷达、高光谱激光雷达等都可以作为云和气溶胶激光雷达进行探测工作.米⁃瑞利散射激光雷达在气溶胶和云的探测中比较常见,因为大气中与激光发生米散射的主要就是气溶胶与云,它可以通过探测由大气分子产生的瑞利散射和由气溶胶产生的米散射的混合光谱信号得到气溶胶的时空变化特征[45-46].由美国NASA和法国国家空间研究中心合作研发的红外探路者卫星(Cloud⁃Aerosol Lidar and Infrared Path nder Satellite Observation,CALIPSO)上携带的正交极化激光雷达(the Cloud⁃Aerosol Lidar with Orthogonal Polarization,CALIOP)是当前应用最为广泛的云与气溶胶激光雷达之一,其上的1064 nm通道和532 nm通道可以对云和气溶胶进行探测,并提供云与气溶胶的垂直信息[47],不过它的使用也不仅仅局限于这一种目的.例如通过CALIPSO观测得到的气溶胶数据,结合其他数据,最终可以反演地面能见度,提供能见度的空间信息[48]. ...
基于卫星气溶胶光学厚度反演地面能见度算法的研究
1
2020
... 云和气溶胶激光雷达的探测目标是云和气溶胶.常见的多通道弹性散射激光雷达、拉曼激光雷达、高光谱激光雷达等都可以作为云和气溶胶激光雷达进行探测工作.米⁃瑞利散射激光雷达在气溶胶和云的探测中比较常见,因为大气中与激光发生米散射的主要就是气溶胶与云,它可以通过探测由大气分子产生的瑞利散射和由气溶胶产生的米散射的混合光谱信号得到气溶胶的时空变化特征[45-46].由美国NASA和法国国家空间研究中心合作研发的红外探路者卫星(Cloud⁃Aerosol Lidar and Infrared Path nder Satellite Observation,CALIPSO)上携带的正交极化激光雷达(the Cloud⁃Aerosol Lidar with Orthogonal Polarization,CALIOP)是当前应用最为广泛的云与气溶胶激光雷达之一,其上的1064 nm通道和532 nm通道可以对云和气溶胶进行探测,并提供云与气溶胶的垂直信息[47],不过它的使用也不仅仅局限于这一种目的.例如通过CALIPSO观测得到的气溶胶数据,结合其他数据,最终可以反演地面能见度,提供能见度的空间信息[48]. ...
Retrieval of surface visibility using satellite?based aerosol measurements
1
2020
... 云和气溶胶激光雷达的探测目标是云和气溶胶.常见的多通道弹性散射激光雷达、拉曼激光雷达、高光谱激光雷达等都可以作为云和气溶胶激光雷达进行探测工作.米⁃瑞利散射激光雷达在气溶胶和云的探测中比较常见,因为大气中与激光发生米散射的主要就是气溶胶与云,它可以通过探测由大气分子产生的瑞利散射和由气溶胶产生的米散射的混合光谱信号得到气溶胶的时空变化特征[45-46].由美国NASA和法国国家空间研究中心合作研发的红外探路者卫星(Cloud⁃Aerosol Lidar and Infrared Path nder Satellite Observation,CALIPSO)上携带的正交极化激光雷达(the Cloud⁃Aerosol Lidar with Orthogonal Polarization,CALIOP)是当前应用最为广泛的云与气溶胶激光雷达之一,其上的1064 nm通道和532 nm通道可以对云和气溶胶进行探测,并提供云与气溶胶的垂直信息[47],不过它的使用也不仅仅局限于这一种目的.例如通过CALIPSO观测得到的气溶胶数据,结合其他数据,最终可以反演地面能见度,提供能见度的空间信息[48]. ...
双差分激光雷达——一组可以提高臭氧测量精度的波长
1
2002
... 臭氧激光雷达是以臭氧为主要探测目标的激光雷达,一般使用差分吸收原理对臭氧进行探测,具体原理在前文已有论述.臭氧差分吸收激光雷达能够全天候探测臭氧的时空分布特征,具有高精度、高时空分辨率、实时在线等优点,通常采用266~289 nm波段和266~308 nm波段的激光来对臭氧进行探测[49],此外也有研究使用三波长双差分激光雷达(266~289~308 nm)来克服臭氧探测中气溶胶的影响. ...
Comparison of tropospheric ozone measurements between three?wavelength dual?dialand two?wavelenghth dial method
1
2002
... 臭氧激光雷达是以臭氧为主要探测目标的激光雷达,一般使用差分吸收原理对臭氧进行探测,具体原理在前文已有论述.臭氧差分吸收激光雷达能够全天候探测臭氧的时空分布特征,具有高精度、高时空分辨率、实时在线等优点,通常采用266~289 nm波段和266~308 nm波段的激光来对臭氧进行探测[49],此外也有研究使用三波长双差分激光雷达(266~289~308 nm)来克服臭氧探测中气溶胶的影响. ...
国外差分吸收激光雷达探测大气CO2研究综述
1
2018
... 差分吸收激光雷达可以直接测量出激光对CO2的吸收截面参数,获得对流层CO2的垂直廓线[50],准确度较高.由于差分吸收截面是温度和压强的函数,所以大气温度、压力等的测量会影响到反演精度,以及激光频率的不同也会导致吸收截面产生差别[51].拉曼激光雷达则具有结构相对简单,设备经济性好的优势[52].与传统的地面监测相比,卫星遥感技术的发展使得我们获得的观测信息扩展至全球范围[53].我国于2022年4月发射的大气环境监测卫星上便搭载了星载二氧化碳激光雷达,可以提供更丰富的观测数据[54]. ...
Review of measurement for atmospheric CO2 differential absorption lidar
1
2018
... 差分吸收激光雷达可以直接测量出激光对CO2的吸收截面参数,获得对流层CO2的垂直廓线[50],准确度较高.由于差分吸收截面是温度和压强的函数,所以大气温度、压力等的测量会影响到反演精度,以及激光频率的不同也会导致吸收截面产生差别[51].拉曼激光雷达则具有结构相对简单,设备经济性好的优势[52].与传统的地面监测相比,卫星遥感技术的发展使得我们获得的观测信息扩展至全球范围[53].我国于2022年4月发射的大气环境监测卫星上便搭载了星载二氧化碳激光雷达,可以提供更丰富的观测数据[54]. ...
机载激光雷达测量二氧化碳浓度误差分析
1
2016
... 差分吸收激光雷达可以直接测量出激光对CO2的吸收截面参数,获得对流层CO2的垂直廓线[50],准确度较高.由于差分吸收截面是温度和压强的函数,所以大气温度、压力等的测量会影响到反演精度,以及激光频率的不同也会导致吸收截面产生差别[51].拉曼激光雷达则具有结构相对简单,设备经济性好的优势[52].与传统的地面监测相比,卫星遥感技术的发展使得我们获得的观测信息扩展至全球范围[53].我国于2022年4月发射的大气环境监测卫星上便搭载了星载二氧化碳激光雷达,可以提供更丰富的观测数据[54]. ...
Errors analysis of dioxide carbon concentrations measurement by airborne lidar
1
2016
... 差分吸收激光雷达可以直接测量出激光对CO2的吸收截面参数,获得对流层CO2的垂直廓线[50],准确度较高.由于差分吸收截面是温度和压强的函数,所以大气温度、压力等的测量会影响到反演精度,以及激光频率的不同也会导致吸收截面产生差别[51].拉曼激光雷达则具有结构相对简单,设备经济性好的优势[52].与传统的地面监测相比,卫星遥感技术的发展使得我们获得的观测信息扩展至全球范围[53].我国于2022年4月发射的大气环境监测卫星上便搭载了星载二氧化碳激光雷达,可以提供更丰富的观测数据[54]. ...
拉曼激光雷达探测合肥西郊低对流层大气二氧化碳垂直分布的统计分析
1
2016
... 差分吸收激光雷达可以直接测量出激光对CO2的吸收截面参数,获得对流层CO2的垂直廓线[50],准确度较高.由于差分吸收截面是温度和压强的函数,所以大气温度、压力等的测量会影响到反演精度,以及激光频率的不同也会导致吸收截面产生差别[51].拉曼激光雷达则具有结构相对简单,设备经济性好的优势[52].与传统的地面监测相比,卫星遥感技术的发展使得我们获得的观测信息扩展至全球范围[53].我国于2022年4月发射的大气环境监测卫星上便搭载了星载二氧化碳激光雷达,可以提供更丰富的观测数据[54]. ...
Statistical analysis of lower?troposphere CO2 vertical distribution measured by Raman lidar in Hefei western suburb
1
2016
... 差分吸收激光雷达可以直接测量出激光对CO2的吸收截面参数,获得对流层CO2的垂直廓线[50],准确度较高.由于差分吸收截面是温度和压强的函数,所以大气温度、压力等的测量会影响到反演精度,以及激光频率的不同也会导致吸收截面产生差别[51].拉曼激光雷达则具有结构相对简单,设备经济性好的优势[52].与传统的地面监测相比,卫星遥感技术的发展使得我们获得的观测信息扩展至全球范围[53].我国于2022年4月发射的大气环境监测卫星上便搭载了星载二氧化碳激光雷达,可以提供更丰富的观测数据[54]. ...
全球碳盘点卫星遥感监测方法、进展与挑战
1
2022
... 差分吸收激光雷达可以直接测量出激光对CO2的吸收截面参数,获得对流层CO2的垂直廓线[50],准确度较高.由于差分吸收截面是温度和压强的函数,所以大气温度、压力等的测量会影响到反演精度,以及激光频率的不同也会导致吸收截面产生差别[51].拉曼激光雷达则具有结构相对简单,设备经济性好的优势[52].与传统的地面监测相比,卫星遥感技术的发展使得我们获得的观测信息扩展至全球范围[53].我国于2022年4月发射的大气环境监测卫星上便搭载了星载二氧化碳激光雷达,可以提供更丰富的观测数据[54]. ...
Satellite remote sensing for global stocktaking:Methods,progress and perspectives
1
2022
... 差分吸收激光雷达可以直接测量出激光对CO2的吸收截面参数,获得对流层CO2的垂直廓线[50],准确度较高.由于差分吸收截面是温度和压强的函数,所以大气温度、压力等的测量会影响到反演精度,以及激光频率的不同也会导致吸收截面产生差别[51].拉曼激光雷达则具有结构相对简单,设备经济性好的优势[52].与传统的地面监测相比,卫星遥感技术的发展使得我们获得的观测信息扩展至全球范围[53].我国于2022年4月发射的大气环境监测卫星上便搭载了星载二氧化碳激光雷达,可以提供更丰富的观测数据[54]. ...
Performance evaluation of spaceborne integrated path differential absorption lidar for carbon dioxide detection at 1572 nm
1
2020
... 差分吸收激光雷达可以直接测量出激光对CO2的吸收截面参数,获得对流层CO2的垂直廓线[50],准确度较高.由于差分吸收截面是温度和压强的函数,所以大气温度、压力等的测量会影响到反演精度,以及激光频率的不同也会导致吸收截面产生差别[51].拉曼激光雷达则具有结构相对简单,设备经济性好的优势[52].与传统的地面监测相比,卫星遥感技术的发展使得我们获得的观测信息扩展至全球范围[53].我国于2022年4月发射的大气环境监测卫星上便搭载了星载二氧化碳激光雷达,可以提供更丰富的观测数据[54]. ...
Simulation of wind profiles from a space?borne Doppler wind lidar
1
2003
... 多普勒测风激光雷达可分为相干探测与直接探测两种,在前面的章节中已有详细论述.HSRL可以用于测风,属于直接探测[25].相干探测多普勒激光雷达具有高灵敏度、高信噪比、易于集成的特点,应用领域更广[37],与直接探测多普勒激光雷达相比,其激光发射功率更低,然而当气溶胶浓度很低时,在中高空中就很难获得风速信息.目前,星载测风激光雷达也在稳步发展中.欧洲空间局(European Space Agency,ESA)研制的全球首颗星载激光测风卫星Aeolus已于2018年成功升空,其上搭载的激光雷达采用直接探测技术,分别通过瑞利通道和米通道进行大气风场的探测[55-56],美国和日本也相继研制了自己的星载测风激光雷达技术体制来对高空风场数据进行补充[57]. ...
1
2009
... 多普勒测风激光雷达可分为相干探测与直接探测两种,在前面的章节中已有详细论述.HSRL可以用于测风,属于直接探测[25].相干探测多普勒激光雷达具有高灵敏度、高信噪比、易于集成的特点,应用领域更广[37],与直接探测多普勒激光雷达相比,其激光发射功率更低,然而当气溶胶浓度很低时,在中高空中就很难获得风速信息.目前,星载测风激光雷达也在稳步发展中.欧洲空间局(European Space Agency,ESA)研制的全球首颗星载激光测风卫星Aeolus已于2018年成功升空,其上搭载的激光雷达采用直接探测技术,分别通过瑞利通道和米通道进行大气风场的探测[55-56],美国和日本也相继研制了自己的星载测风激光雷达技术体制来对高空风场数据进行补充[57]. ...
星载激光测风技术体制及其评估方法综述
1
2022
... 多普勒测风激光雷达可分为相干探测与直接探测两种,在前面的章节中已有详细论述.HSRL可以用于测风,属于直接探测[25].相干探测多普勒激光雷达具有高灵敏度、高信噪比、易于集成的特点,应用领域更广[37],与直接探测多普勒激光雷达相比,其激光发射功率更低,然而当气溶胶浓度很低时,在中高空中就很难获得风速信息.目前,星载测风激光雷达也在稳步发展中.欧洲空间局(European Space Agency,ESA)研制的全球首颗星载激光测风卫星Aeolus已于2018年成功升空,其上搭载的激光雷达采用直接探测技术,分别通过瑞利通道和米通道进行大气风场的探测[55-56],美国和日本也相继研制了自己的星载测风激光雷达技术体制来对高空风场数据进行补充[57]. ...
A review of the technical system of spaceborne Doppler wind lidar and its assessment method
1
2022
... 多普勒测风激光雷达可分为相干探测与直接探测两种,在前面的章节中已有详细论述.HSRL可以用于测风,属于直接探测[25].相干探测多普勒激光雷达具有高灵敏度、高信噪比、易于集成的特点,应用领域更广[37],与直接探测多普勒激光雷达相比,其激光发射功率更低,然而当气溶胶浓度很低时,在中高空中就很难获得风速信息.目前,星载测风激光雷达也在稳步发展中.欧洲空间局(European Space Agency,ESA)研制的全球首颗星载激光测风卫星Aeolus已于2018年成功升空,其上搭载的激光雷达采用直接探测技术,分别通过瑞利通道和米通道进行大气风场的探测[55-56],美国和日本也相继研制了自己的星载测风激光雷达技术体制来对高空风场数据进行补充[57]. ...
Airborne lidar measurements of aerosol optical properties during SAFARI?2000
1
2003
... 空基激光雷达多安装在飞机、飞艇或无人机上,可用于区域尺度的监测任务.与地基激光雷达相比,其观测范围更大,且受天气影响较小,在对云的探测等方面具有优势,例如NASA的云物理激光雷达(Cloud Physics Lidar,CPL)[58]就属于空基激光雷达.不过空基激光雷达成本较高,且在探测中难以进行调整,但它们对于一些区域尺度及复杂地形地区的自然资源调查研究而言非常有利. ...
基于激光雷达的自然资源三维动态监测现状与展望
1
2021
... 星载激光雷达以卫星为观测平台,可以获取大尺度、大范围、高分辨率的三维气象数据,还能提供一些地面上难以观测区域的数据[59].卫星技术的发展使得观测领域得以覆盖全球,进一步推动了自然科学的发展[60].1994年,世界上第一台星载激光雷达(the Lidar InThe Lidar In-Space Technology Experimentspace Technology Experiment,LITE)搭载发现号航天飞机升空[61],此后,星载激光雷达开始快速发展.它们的应用对于全球气象资料的丰富及各项研究而言意义重大,但其技术难度和成本也更高.同时由于依托于卫星的运行,星载激光雷达无法实现对同一地点的连续观测,数据也呈条带状,且难以维护,在未来仍需要进行大量探索. ...
Current status and prospect of three?dimensional dynamic monitoring of natural resources based on Lidar
1
2021
... 星载激光雷达以卫星为观测平台,可以获取大尺度、大范围、高分辨率的三维气象数据,还能提供一些地面上难以观测区域的数据[59].卫星技术的发展使得观测领域得以覆盖全球,进一步推动了自然科学的发展[60].1994年,世界上第一台星载激光雷达(the Lidar InThe Lidar In-Space Technology Experimentspace Technology Experiment,LITE)搭载发现号航天飞机升空[61],此后,星载激光雷达开始快速发展.它们的应用对于全球气象资料的丰富及各项研究而言意义重大,但其技术难度和成本也更高.同时由于依托于卫星的运行,星载激光雷达无法实现对同一地点的连续观测,数据也呈条带状,且难以维护,在未来仍需要进行大量探索. ...
中国空间地球科学发展现状及未来策略
1
2021
... 星载激光雷达以卫星为观测平台,可以获取大尺度、大范围、高分辨率的三维气象数据,还能提供一些地面上难以观测区域的数据[59].卫星技术的发展使得观测领域得以覆盖全球,进一步推动了自然科学的发展[60].1994年,世界上第一台星载激光雷达(the Lidar InThe Lidar In-Space Technology Experimentspace Technology Experiment,LITE)搭载发现号航天飞机升空[61],此后,星载激光雷达开始快速发展.它们的应用对于全球气象资料的丰富及各项研究而言意义重大,但其技术难度和成本也更高.同时由于依托于卫星的运行,星载激光雷达无法实现对同一地点的连续观测,数据也呈条带状,且难以维护,在未来仍需要进行大量探索. ...
Deve?lopments and future strategies of earth science from space in China
1
2021
... 星载激光雷达以卫星为观测平台,可以获取大尺度、大范围、高分辨率的三维气象数据,还能提供一些地面上难以观测区域的数据[59].卫星技术的发展使得观测领域得以覆盖全球,进一步推动了自然科学的发展[60].1994年,世界上第一台星载激光雷达(the Lidar InThe Lidar In-Space Technology Experimentspace Technology Experiment,LITE)搭载发现号航天飞机升空[61],此后,星载激光雷达开始快速发展.它们的应用对于全球气象资料的丰富及各项研究而言意义重大,但其技术难度和成本也更高.同时由于依托于卫星的运行,星载激光雷达无法实现对同一地点的连续观测,数据也呈条带状,且难以维护,在未来仍需要进行大量探索. ...
LITE?the first spaceborne lidar
1
1995
... 星载激光雷达以卫星为观测平台,可以获取大尺度、大范围、高分辨率的三维气象数据,还能提供一些地面上难以观测区域的数据[59].卫星技术的发展使得观测领域得以覆盖全球,进一步推动了自然科学的发展[60].1994年,世界上第一台星载激光雷达(the Lidar InThe Lidar In-Space Technology Experimentspace Technology Experiment,LITE)搭载发现号航天飞机升空[61],此后,星载激光雷达开始快速发展.它们的应用对于全球气象资料的丰富及各项研究而言意义重大,但其技术难度和成本也更高.同时由于依托于卫星的运行,星载激光雷达无法实现对同一地点的连续观测,数据也呈条带状,且难以维护,在未来仍需要进行大量探索. ...
第二章 常用激光器
1
2002
... 气体激光雷达所使用的激光器为气体激光器,例如使用氦氖激光器及二氧化碳激光器等.它们输出的光束具有较好的方向性和单色性,频率稳定性高,输出激光波长范围广[62],在大气风场、大气环境等的监测中作用重大. ...
Chapter 2 Common Lasers
1
2002
... 气体激光雷达所使用的激光器为气体激光器,例如使用氦氖激光器及二氧化碳激光器等.它们输出的光束具有较好的方向性和单色性,频率稳定性高,输出激光波长范围广[62],在大气风场、大气环境等的监测中作用重大. ...
固体激光雷达技术发展现状
1
1999
... 固体激光雷达指以固体激光器作为核心部件的激光雷达,具有体积小、可靠性高、稳定性高、功率高等特点[63],不过价格一般相对昂贵. ...
The state of arts on solid state ladar technology
1
1999
... 固体激光雷达指以固体激光器作为核心部件的激光雷达,具有体积小、可靠性高、稳定性高、功率高等特点[63],不过价格一般相对昂贵. ...
固体激光雷达的发展现状
1
1991
... 半导体激光雷达使用的是半导体激光器.由于半导体本身也是固体,因此理论上也可以看作是广义的固体激光雷达.它们的使用寿命很长,可以进行连续探测工作,且有体积小、结构简单、造价低、可靠性高及对人眼伤害小的特点,被大量使用在例如探测云底高度的米散射测量等研究中[64].半导体激光雷达曾因相干性较差及低功率而受到限制,无法进行远距离探测[65].而今,随着半导体激光器器件的高速发展,半导体激光器具有了高功率、高效率的特点,在军事、航天等领域内备受青睐[66]. ...
Development of the solid laser radar
1
1991
... 半导体激光雷达使用的是半导体激光器.由于半导体本身也是固体,因此理论上也可以看作是广义的固体激光雷达.它们的使用寿命很长,可以进行连续探测工作,且有体积小、结构简单、造价低、可靠性高及对人眼伤害小的特点,被大量使用在例如探测云底高度的米散射测量等研究中[64].半导体激光雷达曾因相干性较差及低功率而受到限制,无法进行远距离探测[65].而今,随着半导体激光器器件的高速发展,半导体激光器具有了高功率、高效率的特点,在军事、航天等领域内备受青睐[66]. ...
非扫描成像半导体激光雷达
1
1995
... 半导体激光雷达使用的是半导体激光器.由于半导体本身也是固体,因此理论上也可以看作是广义的固体激光雷达.它们的使用寿命很长,可以进行连续探测工作,且有体积小、结构简单、造价低、可靠性高及对人眼伤害小的特点,被大量使用在例如探测云底高度的米散射测量等研究中[64].半导体激光雷达曾因相干性较差及低功率而受到限制,无法进行远距离探测[65].而今,随着半导体激光器器件的高速发展,半导体激光器具有了高功率、高效率的特点,在军事、航天等领域内备受青睐[66]. ...
Nonscanned imaging semiconductor laser radar
1
1995
... 半导体激光雷达使用的是半导体激光器.由于半导体本身也是固体,因此理论上也可以看作是广义的固体激光雷达.它们的使用寿命很长,可以进行连续探测工作,且有体积小、结构简单、造价低、可靠性高及对人眼伤害小的特点,被大量使用在例如探测云底高度的米散射测量等研究中[64].半导体激光雷达曾因相干性较差及低功率而受到限制,无法进行远距离探测[65].而今,随着半导体激光器器件的高速发展,半导体激光器具有了高功率、高效率的特点,在军事、航天等领域内备受青睐[66]. ...
半导体激光器的最新进展及其应用现状
1
2001
... 半导体激光雷达使用的是半导体激光器.由于半导体本身也是固体,因此理论上也可以看作是广义的固体激光雷达.它们的使用寿命很长,可以进行连续探测工作,且有体积小、结构简单、造价低、可靠性高及对人眼伤害小的特点,被大量使用在例如探测云底高度的米散射测量等研究中[64].半导体激光雷达曾因相干性较差及低功率而受到限制,无法进行远距离探测[65].而今,随着半导体激光器器件的高速发展,半导体激光器具有了高功率、高效率的特点,在军事、航天等领域内备受青睐[66]. ...
New progress in semiconductor lasers and their applications
1
2001
... 半导体激光雷达使用的是半导体激光器.由于半导体本身也是固体,因此理论上也可以看作是广义的固体激光雷达.它们的使用寿命很长,可以进行连续探测工作,且有体积小、结构简单、造价低、可靠性高及对人眼伤害小的特点,被大量使用在例如探测云底高度的米散射测量等研究中[64].半导体激光雷达曾因相干性较差及低功率而受到限制,无法进行远距离探测[65].而今,随着半导体激光器器件的高速发展,半导体激光器具有了高功率、高效率的特点,在军事、航天等领域内备受青睐[66]. ...
用于气溶胶探测光学雷达的LED光源的研制
1
2018
... 此外,还有一种使用LED作为光源的LED光学雷达[67],它使用了低能量的连续光源LED光源,可用于近距离探测.尽管LED光学雷达使用的不是激光光源,但它符合激光雷达英文Lidar (Light Detection and Ranging,光学探测及测距)的描述,因此本文依然对其进行了列举. ...
Development of LED light source for aerosol detection optical radar
1
2018
... 此外,还有一种使用LED作为光源的LED光学雷达[67],它使用了低能量的连续光源LED光源,可用于近距离探测.尽管LED光学雷达使用的不是激光光源,但它符合激光雷达英文Lidar (Light Detection and Ranging,光学探测及测距)的描述,因此本文依然对其进行了列举. ...
Micro pulse lidar
1
1993
... 使用脉冲激光作为光源的激光雷达为脉冲激光雷达.脉冲激光的能量在时间上是不恒定的,其峰值功率远大于平均功率,且每两个功率峰值之间存在一定的时间间隔.大部分后向散射激光雷达都属于脉冲激光雷达,利用脉冲法进行测距.值得一提的是,有一种紧凑型脉冲激光雷达被命名为微脉冲激光雷达(Micro Pulse Lidar,MPL)[68],其脉冲间隔较小,脉冲能量为微焦级别,不会伤害眼睛. ...
Observations by lidar of linear depolarization ratios for hydrometeors
1
1971
... 如果激光雷达拥有测量偏振度的能力,那么这个激光雷达就可以被称为偏振激光雷达[69-70]. ...
微脉冲偏振激光雷达探测城市底层气溶胶
1
2012
... 如果激光雷达拥有测量偏振度的能力,那么这个激光雷达就可以被称为偏振激光雷达[69-70]. ...
Detection of bottom aerosols in urban area using micro?pulse polarization lidar
1
2012
... 如果激光雷达拥有测量偏振度的能力,那么这个激光雷达就可以被称为偏振激光雷达[69-70]. ...
Study of horizontally oriented ice crystals with CALIPSO observations and comparison with Monte Carlo radiative transfer simulations
1
2012
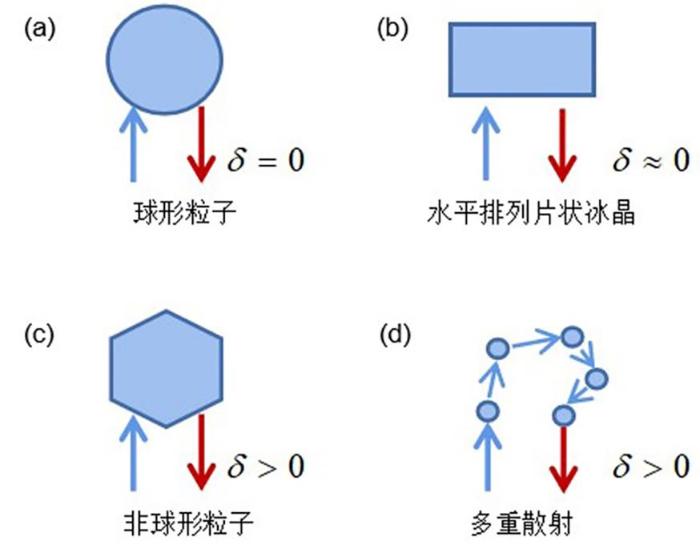
... 大部分偏振激光雷达使用线偏振激光作为光源,因此可以被称为线偏振激光雷达.如果激光雷达同时测量平行于激光偏振方向和垂直于激光偏振方向的回波的强度,并通过回波的退偏比来判断大气粒子的类型,则可以被称为正交极化激光雷达.例如,CALIOP的中文名称就含有“正交极化”这个名词.线偏振激光雷达可以获取粒子的形状信息.球形粒子(水云滴)产生的单次散射回波的退偏比为0,水平排列的片状冰晶回波的退偏比非常接近于0[71],而非球形粒子的单次散射回波的退偏比大于0,多次散射回波信号所对应的退偏比也是大于0的(图4). ...
Discriminating between spherical and non?spherical scatterers with lidar using circular polarization: a theoretical study
1
2003
... 如果在激光器前方加入一个四分之一波片,使得发射激光变成圆偏振波,那么这种激光雷达可以被称为圆偏振激光雷达.圆偏振激光雷达同样可以用来进行粒子形状的识别,其优势在于受多次散射对退偏比的影响小于线偏振激光雷达[72]. ...
Multiple field of view lidar returns from atmospheric aerosols
1
1994
... Hutt et al[73]设计的多视场激光雷达(Multiple⁃field⁃of⁃View Lidar,MFOV)则可以同时以多个不同视场角来对大气进行观测.视场角较小的通道接收到的回波以单次散射为主,而视场角较大的通道则会接收到更多的多次散射信号.由于不同大小的粒子前后向散射相函数存在巨大差异,故可以通过不同视场接收到的回波强度的差异来反演粒子的粒径信息. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}