Research on satellite cloud image prediction based on 3D convolution and self⁃attention
Fang Wei,1,2,3, Li Jiaxin1, Lu Wenhe1
1.Engineering Research Center of Digital Forensics,Ministry of Education,School of Computer and Software,Nanjing University of Information Science and Technology,Nanjing,210044,China
2.State Key Laboratory of Meteorological Disasters,Beijing,100081,China
3.Jiangsu Provincial Collaborative Innovation Center for Atmospheric Environment and Equipment Technology,Nanjing University of Information Science and Technology,Nanjing,210044,China
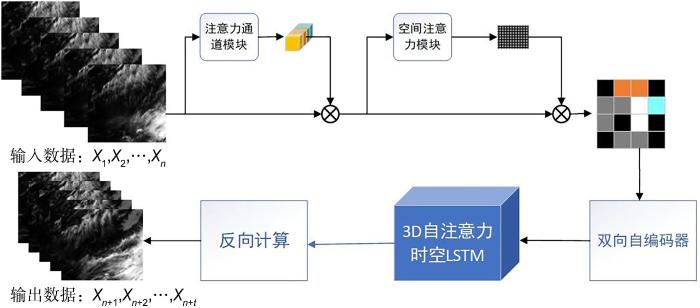
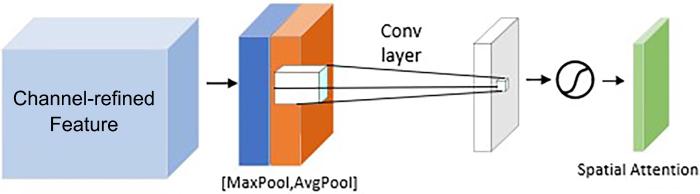
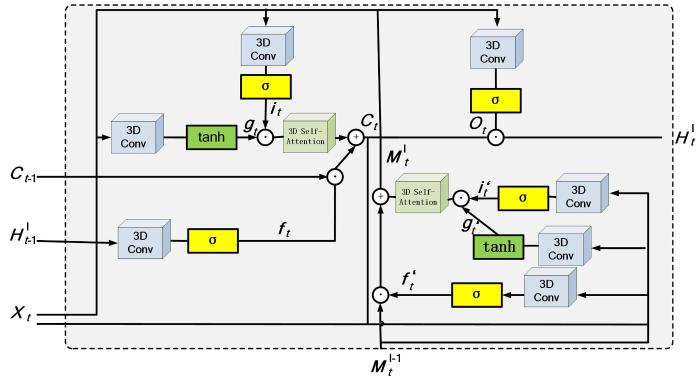
卫星云图是气象预报的重要资源之一,可以显示云层的生消变化,对气象分析和预报工作有极大的作用.对云图进行一定时间段的预测有助于及时掌握云层的移动轨迹和变化情况,提高卫星云图资料的实用性.然而,当前卫星云图的预测面临诸多困难,例如,云团的变化大多是非平稳、非线性的;云图数据量小,实时性差等.因此,从时空序列的角度出发,提出一种基于3D卷积和自注意力机制的卫星云图预测模型,该模型在ST⁃LSTM (Spatiotemporal Long Short⁃Term Memory)的基础上,在其单元内部引入3D卷积和自注意力机制,使模型能同时提取时间信息和空间特征,进一步增强云层短期趋势和长期依赖的联系;同时,在其外部框架使用空间和通道注意力机制,促进对云图空间特征的提取.在风云四号的卫星云图上进行评估,实验结果证明,该模型能够较准确地预测云层的形态变化和运动轨迹,各项评价指标均优于现有模型.
关键词:风云四号
;
云图预测
;
3D卷积
;
注意力机制
Abstract
Satellite cloud image is one of the important resources of meteorological forecast. It plays a great role in meteorological analysis and forecasting by showing the generation and disappearance of clouds. Predicting cloud image in a certain period of time is helpful to grasp the movement trajectory and changes of cloud layers in time,and improve the practicability of satellite cloud image data. However,the prediction of the satellite cloud images is facing many difficulties,such as most changes in cloud clusters are non⁃stationary and nonlinear. There are many problems such as small cloud map data and poor real⁃time performance. Therefore,we propose a satellite cloud image prediction model based on 3D convolution and self⁃attention mechanism from the perspective of spatiotemporal sequence. On the basis of ST⁃LSTM (Spatiotemporal Long Short⁃Term Memory),this model introduces 3D convolution and self attention mechanism into its unit,which enables the model to extract temporal information and spatial features at the same time,furtherly enhance the relationship between short⁃term trend and long⁃term dependence on clouds; At the same time,space and channel attention mechanisms are used in its external framework to promote the extraction of spatial features of cloud images. In this paper,the evaluation is carried out on the Fengyun⁃4 satellite cloud image. Experimental results show that the model more accurately predicts the morphological changes and movement trajectories of clouds,and is superior to the existing models in various evaluation indicators.
Fang Wei, Li Jiaxin, Lu Wenhe. Research on satellite cloud image prediction based on 3D convolution and self⁃attention. Journal of nanjing University[J], 2023, 59(1): 155-164 doi:10.13232/j.cnki.jnju.2023.01.015
传统的卫星云图预测方法主要通过云团的匹配和追踪来进行研究[7].研究人员肉眼观看某个云图后,记录观察到的云团,将其结构形状用特征量表示出来,再查找后面时刻的卫星云图是否存在相似的云团,如果存在则记录该云团的空间信息,进而确定云团的移动轨迹[8].最后,根据大气运动的时空延续性,对目标云团进行线性外推,实现卫星云图的预测.2000年龚克等[9]利用基于MPEG⁃2中运动矢量的方法预测了云团运动轨迹.2004年Lorenz et al[10]使用Heliosat2方法获取云图的相关指标,结合运动矢量方法实现云团运动预测.2010年杨俊等[11]利用局部阈值的思想对地基云图中的云团进行了预测.传统方法对卫星云图中云团的匹配和追踪有一定难度,采用的预测方法大多是线性的.然而,大气运动过程中存在大量非线性变化,如云团自身的形变和翻转等非平稳变化,因此,传统卫星云图预测方法很难得到准确的预测结果.
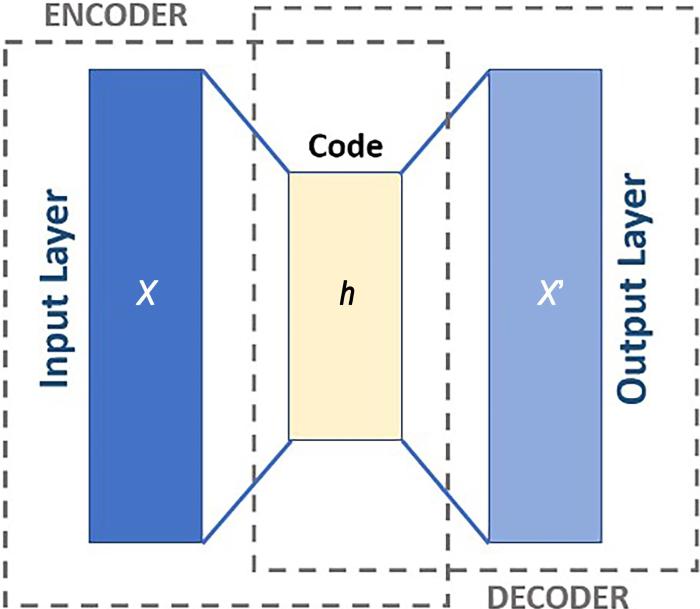
Xing et al[12]提出一种动态编码模型.首先,编码器对像素图像进行编码,得到一个变量,这个变量与其状态相关,再对这个变量进一步编码,反复操作.这就是采用逐层训练的方法构建一个多层编码器.Udrescu and Tegmark[13]搭建一个基于卷积自编码器的预测模型,模型主要由两部分组成,第一部分用于获取输入的图像和时间差,将这两个部分进行编码之后传递给第二部分,也就是解码器,将输出的矢量转换为对应的图像,但该模型无法准确地预测动作变化.Liu et al[14]构建了一个光流模型,它由三个卷积层和三个反卷积层组成,卷积层和反卷积层用跳跃连接,能够更好地保留空间信息.Xue et al[15]搭建基于自编码器和由卷积网络改进的预测模型,创建了条件变分自编码器,能获取未来图像的条件分布,实验证明该模型取得了不错的效果.
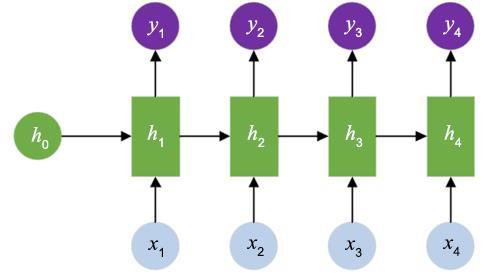
RNN有权值共享的优势,在时间序列预测任务中可以根据当前时刻的输入数据和上一个时刻的隐藏状态得到当前时刻的预测数据,并对隐藏状态进行更新和记录,因此具有一定的记忆功能.但是对于长时间序列问题,RNN的处理效果较差,还容易出现梯度消失等问题.Hochreite and Schmidhuber[17]提出LSTM,解决了这个问题.LSTM通过状态单元记录从长时间序列中提取有用的信息并记录下来,同时采用输入门、遗忘门和输出门控制输入信息的提取、状态单元的更新以及输出信息的选择.尽管如此,LSTM也只能处理时序数据,对于卫星云图预测和雷达回波等时空序列问题,无法捕捉图像的空间信息.
Shi et al[18]在LSTM的基础上提出卷积长短期记忆神经网络(Convolutional LSTM,Conv⁃LSTM)用于预测雷达回波图,取得了良好的预测结果,开启了利用RNN进行时空预测研究的新纪元.ConvLSTM通过卷积学习之前状态的空间信息,因此具备了同时提取空间特征和时间特征的能力.该方法成功地对短时雷达回波图像进行了预测,其结果比实时光流法更加准确.此后,在ConvLSTM的基础上发展了很多改进的变体结构,如Shi et al[19]引入光流轨迹的思想提出轨迹门控循环单元(Trajectory GRU,Traj GRU),可以主动学习用于重复连接的位置变化结构,进一步提高了预测的准确率.
为了提高网络对时空特征的非线性拟合能力,LSTM常被堆叠使用,但对于简单的堆叠结构,时空信息分别沿时间步横向传递和沿堆叠层纵向传递,纵向传递的时空信息没有得到有效利用.因此,Wang et al[20]提出时空长短期记忆(Spatiotemporal LSTM,ST⁃LSTM),将纵向传递的信息连接到下一时间步,并使用额外的时空记忆单元对其进行更新和传递.Requena⁃Mesa et al[21]将生成对抗网络和LSTM网络结合起来预测卫星云图,效果不错.然而,标准LSTM单元仅使用一个输入门和一个遗忘门来完成输入信息的提取以及状态单元的遗忘和更新,往往只能提取输入信息中的部分信息对状态单元进行更新,因此输入信息中的部分有效信息可能会被丢失.Chang et al[22]提出运动感知单元(Motion⁃Aware Unit,MAU),通过有效拓宽时间感受野来提高模型在捕捉运动信息方面的表达能力.其包含两个模块,一个关注模块和一个融合模块,实验结果证明,两个模块取得了不错的效果.Gao et al[23]提出SimVP,不使用复杂的模块,如RNN,LSTM和Transformer,也不引入复杂的训练策略,如对抗性训练和课程学习.SimVP仅需CNN、跳连和MSE损失,为未来的研究提供了一种新思路.
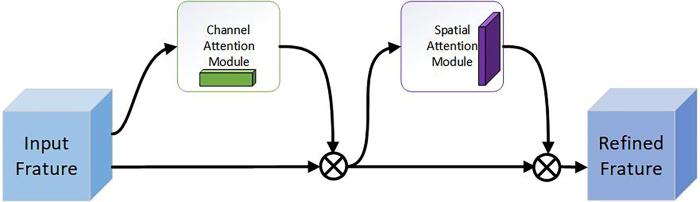
2015年Chorowski et al[26]提出注意力机制来获取机器翻译中原始序列和目标序列之间的联系,让模型能获取更长时间的信息.注意力机制实质上是人类观察事物的方式,也就是人脑会特意注重某些特殊的事物,不自觉地忽视该事物之外的其他部分.注意力机制可以给输入特征的不同部分赋予不同的权重,经过权重重新表达的输入特征更容易被提取到有效的信息.此处的权重可以看作人眼的敏锐度,即视网膜的不同部位有不同程度的信息处理能力.近几年,注意力机制被广泛应用于图像处理、自然语言处理和情感分类等多样化任务[27-28],均获得了可观的性能提升.传统ConvLSTM虽然能学习图像序列的有效时空信息并记忆特征,却无法掌握图像序列的重要部分来提取某些细节.为了解决这一问题,一些工作[29-30]尝试将注意力机制应用于LSTM或ConvLSTM以提高其序列学习性能,然而,大多数模型都将注意力机制放入外部来提取特征,将注意力机制融合进预测细胞内部的研究还不多,所以没能完全消除ConvLSTM缺少掌握细节能力的缺点.受此启发,本文设计了一种新的自注意力记忆模块,将该模块与预测单元融合,下文中称其为自注意力门.预测单元加入自注意力门后,不仅能记录历史信息,还能把控关键细节,以此来计算云图序列的哪一部分更重要,并赋予更大的权重.其具体结构如图7所示.
ChenJ. Research on clouds recognition and short⁃time extra⁃polation method in ground⁃based cloud image. Master Dissertation. Tianjin:Tianjin University,2015.
TaoR Z. Research on cloud detection and precipitation extrapolation forecast in Tibet based on Fengyun 4 satellite image. Ph.D. Dissertation. Nanjing:Nanjing University of Infor⁃mation Science and Technology,2021.
... 传统的卫星云图预测方法主要通过云团的匹配和追踪来进行研究[7].研究人员肉眼观看某个云图后,记录观察到的云团,将其结构形状用特征量表示出来,再查找后面时刻的卫星云图是否存在相似的云团,如果存在则记录该云团的空间信息,进而确定云团的移动轨迹[8].最后,根据大气运动的时空延续性,对目标云团进行线性外推,实现卫星云图的预测.2000年龚克等[9]利用基于MPEG⁃2中运动矢量的方法预测了云团运动轨迹.2004年Lorenz et al[10]使用Heliosat2方法获取云图的相关指标,结合运动矢量方法实现云团运动预测.2010年杨俊等[11]利用局部阈值的思想对地基云图中的云团进行了预测.传统方法对卫星云图中云团的匹配和追踪有一定难度,采用的预测方法大多是线性的.然而,大气运动过程中存在大量非线性变化,如云团自身的形变和翻转等非平稳变化,因此,传统卫星云图预测方法很难得到准确的预测结果. ...
Recognition and tracing of severe convective cloud from IR images of GMS
1
1997
... 传统的卫星云图预测方法主要通过云团的匹配和追踪来进行研究[7].研究人员肉眼观看某个云图后,记录观察到的云团,将其结构形状用特征量表示出来,再查找后面时刻的卫星云图是否存在相似的云团,如果存在则记录该云团的空间信息,进而确定云团的移动轨迹[8].最后,根据大气运动的时空延续性,对目标云团进行线性外推,实现卫星云图的预测.2000年龚克等[9]利用基于MPEG⁃2中运动矢量的方法预测了云团运动轨迹.2004年Lorenz et al[10]使用Heliosat2方法获取云图的相关指标,结合运动矢量方法实现云团运动预测.2010年杨俊等[11]利用局部阈值的思想对地基云图中的云团进行了预测.传统方法对卫星云图中云团的匹配和追踪有一定难度,采用的预测方法大多是线性的.然而,大气运动过程中存在大量非线性变化,如云团自身的形变和翻转等非平稳变化,因此,传统卫星云图预测方法很难得到准确的预测结果. ...
地基云图中云团的识别和短时外推方法研究
1
2015
... 传统的卫星云图预测方法主要通过云团的匹配和追踪来进行研究[7].研究人员肉眼观看某个云图后,记录观察到的云团,将其结构形状用特征量表示出来,再查找后面时刻的卫星云图是否存在相似的云团,如果存在则记录该云团的空间信息,进而确定云团的移动轨迹[8].最后,根据大气运动的时空延续性,对目标云团进行线性外推,实现卫星云图的预测.2000年龚克等[9]利用基于MPEG⁃2中运动矢量的方法预测了云团运动轨迹.2004年Lorenz et al[10]使用Heliosat2方法获取云图的相关指标,结合运动矢量方法实现云团运动预测.2010年杨俊等[11]利用局部阈值的思想对地基云图中的云团进行了预测.传统方法对卫星云图中云团的匹配和追踪有一定难度,采用的预测方法大多是线性的.然而,大气运动过程中存在大量非线性变化,如云团自身的形变和翻转等非平稳变化,因此,传统卫星云图预测方法很难得到准确的预测结果. ...
1
2015
... 传统的卫星云图预测方法主要通过云团的匹配和追踪来进行研究[7].研究人员肉眼观看某个云图后,记录观察到的云团,将其结构形状用特征量表示出来,再查找后面时刻的卫星云图是否存在相似的云团,如果存在则记录该云团的空间信息,进而确定云团的移动轨迹[8].最后,根据大气运动的时空延续性,对目标云团进行线性外推,实现卫星云图的预测.2000年龚克等[9]利用基于MPEG⁃2中运动矢量的方法预测了云团运动轨迹.2004年Lorenz et al[10]使用Heliosat2方法获取云图的相关指标,结合运动矢量方法实现云团运动预测.2010年杨俊等[11]利用局部阈值的思想对地基云图中的云团进行了预测.传统方法对卫星云图中云团的匹配和追踪有一定难度,采用的预测方法大多是线性的.然而,大气运动过程中存在大量非线性变化,如云团自身的形变和翻转等非平稳变化,因此,传统卫星云图预测方法很难得到准确的预测结果. ...
卫星云图预测的运动矢量方法
1
2000
... 传统的卫星云图预测方法主要通过云团的匹配和追踪来进行研究[7].研究人员肉眼观看某个云图后,记录观察到的云团,将其结构形状用特征量表示出来,再查找后面时刻的卫星云图是否存在相似的云团,如果存在则记录该云团的空间信息,进而确定云团的移动轨迹[8].最后,根据大气运动的时空延续性,对目标云团进行线性外推,实现卫星云图的预测.2000年龚克等[9]利用基于MPEG⁃2中运动矢量的方法预测了云团运动轨迹.2004年Lorenz et al[10]使用Heliosat2方法获取云图的相关指标,结合运动矢量方法实现云团运动预测.2010年杨俊等[11]利用局部阈值的思想对地基云图中的云团进行了预测.传统方法对卫星云图中云团的匹配和追踪有一定难度,采用的预测方法大多是线性的.然而,大气运动过程中存在大量非线性变化,如云团自身的形变和翻转等非平稳变化,因此,传统卫星云图预测方法很难得到准确的预测结果. ...
A method for geostationary meteorological satellite cloud image prediction based on motion vector
1
2000
... 传统的卫星云图预测方法主要通过云团的匹配和追踪来进行研究[7].研究人员肉眼观看某个云图后,记录观察到的云团,将其结构形状用特征量表示出来,再查找后面时刻的卫星云图是否存在相似的云团,如果存在则记录该云团的空间信息,进而确定云团的移动轨迹[8].最后,根据大气运动的时空延续性,对目标云团进行线性外推,实现卫星云图的预测.2000年龚克等[9]利用基于MPEG⁃2中运动矢量的方法预测了云团运动轨迹.2004年Lorenz et al[10]使用Heliosat2方法获取云图的相关指标,结合运动矢量方法实现云团运动预测.2010年杨俊等[11]利用局部阈值的思想对地基云图中的云团进行了预测.传统方法对卫星云图中云团的匹配和追踪有一定难度,采用的预测方法大多是线性的.然而,大气运动过程中存在大量非线性变化,如云团自身的形变和翻转等非平稳变化,因此,传统卫星云图预测方法很难得到准确的预测结果. ...
Short term forecasting of solar radiation based on satellite data
1
2004
... 传统的卫星云图预测方法主要通过云团的匹配和追踪来进行研究[7].研究人员肉眼观看某个云图后,记录观察到的云团,将其结构形状用特征量表示出来,再查找后面时刻的卫星云图是否存在相似的云团,如果存在则记录该云团的空间信息,进而确定云团的移动轨迹[8].最后,根据大气运动的时空延续性,对目标云团进行线性外推,实现卫星云图的预测.2000年龚克等[9]利用基于MPEG⁃2中运动矢量的方法预测了云团运动轨迹.2004年Lorenz et al[10]使用Heliosat2方法获取云图的相关指标,结合运动矢量方法实现云团运动预测.2010年杨俊等[11]利用局部阈值的思想对地基云图中的云团进行了预测.传统方法对卫星云图中云团的匹配和追踪有一定难度,采用的预测方法大多是线性的.然而,大气运动过程中存在大量非线性变化,如云团自身的形变和翻转等非平稳变化,因此,传统卫星云图预测方法很难得到准确的预测结果. ...
基于局部阈值插值的地基云自动检测方法
1
2010
... 传统的卫星云图预测方法主要通过云团的匹配和追踪来进行研究[7].研究人员肉眼观看某个云图后,记录观察到的云团,将其结构形状用特征量表示出来,再查找后面时刻的卫星云图是否存在相似的云团,如果存在则记录该云团的空间信息,进而确定云团的移动轨迹[8].最后,根据大气运动的时空延续性,对目标云团进行线性外推,实现卫星云图的预测.2000年龚克等[9]利用基于MPEG⁃2中运动矢量的方法预测了云团运动轨迹.2004年Lorenz et al[10]使用Heliosat2方法获取云图的相关指标,结合运动矢量方法实现云团运动预测.2010年杨俊等[11]利用局部阈值的思想对地基云图中的云团进行了预测.传统方法对卫星云图中云团的匹配和追踪有一定难度,采用的预测方法大多是线性的.然而,大气运动过程中存在大量非线性变化,如云团自身的形变和翻转等非平稳变化,因此,传统卫星云图预测方法很难得到准确的预测结果. ...
An automatic ground?based cloud detection method based on the local threshold interpolation
1
2010
... 传统的卫星云图预测方法主要通过云团的匹配和追踪来进行研究[7].研究人员肉眼观看某个云图后,记录观察到的云团,将其结构形状用特征量表示出来,再查找后面时刻的卫星云图是否存在相似的云团,如果存在则记录该云团的空间信息,进而确定云团的移动轨迹[8].最后,根据大气运动的时空延续性,对目标云团进行线性外推,实现卫星云图的预测.2000年龚克等[9]利用基于MPEG⁃2中运动矢量的方法预测了云团运动轨迹.2004年Lorenz et al[10]使用Heliosat2方法获取云图的相关指标,结合运动矢量方法实现云团运动预测.2010年杨俊等[11]利用局部阈值的思想对地基云图中的云团进行了预测.传统方法对卫星云图中云团的匹配和追踪有一定难度,采用的预测方法大多是线性的.然而,大气运动过程中存在大量非线性变化,如云团自身的形变和翻转等非平稳变化,因此,传统卫星云图预测方法很难得到准确的预测结果. ...
Modeling video dynamics with deep dynencoder
1
2014
... Xing et al[12]提出一种动态编码模型.首先,编码器对像素图像进行编码,得到一个变量,这个变量与其状态相关,再对这个变量进一步编码,反复操作.这就是采用逐层训练的方法构建一个多层编码器.Udrescu and Tegmark[13]搭建一个基于卷积自编码器的预测模型,模型主要由两部分组成,第一部分用于获取输入的图像和时间差,将这两个部分进行编码之后传递给第二部分,也就是解码器,将输出的矢量转换为对应的图像,但该模型无法准确地预测动作变化.Liu et al[14]构建了一个光流模型,它由三个卷积层和三个反卷积层组成,卷积层和反卷积层用跳跃连接,能够更好地保留空间信息.Xue et al[15]搭建基于自编码器和由卷积网络改进的预测模型,创建了条件变分自编码器,能获取未来图像的条件分布,实验证明该模型取得了不错的效果. ...
Symbolic pregression:Discovering physical laws from distorted video
1
2021
... Xing et al[12]提出一种动态编码模型.首先,编码器对像素图像进行编码,得到一个变量,这个变量与其状态相关,再对这个变量进一步编码,反复操作.这就是采用逐层训练的方法构建一个多层编码器.Udrescu and Tegmark[13]搭建一个基于卷积自编码器的预测模型,模型主要由两部分组成,第一部分用于获取输入的图像和时间差,将这两个部分进行编码之后传递给第二部分,也就是解码器,将输出的矢量转换为对应的图像,但该模型无法准确地预测动作变化.Liu et al[14]构建了一个光流模型,它由三个卷积层和三个反卷积层组成,卷积层和反卷积层用跳跃连接,能够更好地保留空间信息.Xue et al[15]搭建基于自编码器和由卷积网络改进的预测模型,创建了条件变分自编码器,能获取未来图像的条件分布,实验证明该模型取得了不错的效果. ...
Video frame synthesis using deep voxel flow
1
2017
... Xing et al[12]提出一种动态编码模型.首先,编码器对像素图像进行编码,得到一个变量,这个变量与其状态相关,再对这个变量进一步编码,反复操作.这就是采用逐层训练的方法构建一个多层编码器.Udrescu and Tegmark[13]搭建一个基于卷积自编码器的预测模型,模型主要由两部分组成,第一部分用于获取输入的图像和时间差,将这两个部分进行编码之后传递给第二部分,也就是解码器,将输出的矢量转换为对应的图像,但该模型无法准确地预测动作变化.Liu et al[14]构建了一个光流模型,它由三个卷积层和三个反卷积层组成,卷积层和反卷积层用跳跃连接,能够更好地保留空间信息.Xue et al[15]搭建基于自编码器和由卷积网络改进的预测模型,创建了条件变分自编码器,能获取未来图像的条件分布,实验证明该模型取得了不错的效果. ...
Visual dynamics:Probabilistic future frame synthesis via cross convolutional networks
1
2016
... Xing et al[12]提出一种动态编码模型.首先,编码器对像素图像进行编码,得到一个变量,这个变量与其状态相关,再对这个变量进一步编码,反复操作.这就是采用逐层训练的方法构建一个多层编码器.Udrescu and Tegmark[13]搭建一个基于卷积自编码器的预测模型,模型主要由两部分组成,第一部分用于获取输入的图像和时间差,将这两个部分进行编码之后传递给第二部分,也就是解码器,将输出的矢量转换为对应的图像,但该模型无法准确地预测动作变化.Liu et al[14]构建了一个光流模型,它由三个卷积层和三个反卷积层组成,卷积层和反卷积层用跳跃连接,能够更好地保留空间信息.Xue et al[15]搭建基于自编码器和由卷积网络改进的预测模型,创建了条件变分自编码器,能获取未来图像的条件分布,实验证明该模型取得了不错的效果. ...
... RNN有权值共享的优势,在时间序列预测任务中可以根据当前时刻的输入数据和上一个时刻的隐藏状态得到当前时刻的预测数据,并对隐藏状态进行更新和记录,因此具有一定的记忆功能.但是对于长时间序列问题,RNN的处理效果较差,还容易出现梯度消失等问题.Hochreite and Schmidhuber[17]提出LSTM,解决了这个问题.LSTM通过状态单元记录从长时间序列中提取有用的信息并记录下来,同时采用输入门、遗忘门和输出门控制输入信息的提取、状态单元的更新以及输出信息的选择.尽管如此,LSTM也只能处理时序数据,对于卫星云图预测和雷达回波等时空序列问题,无法捕捉图像的空间信息. ...
Convolutional LSTM network:A machine learning approach for precipitation nowcasting
2
2015
... Shi et al[18]在LSTM的基础上提出卷积长短期记忆神经网络(Convolutional LSTM,Conv⁃LSTM)用于预测雷达回波图,取得了良好的预测结果,开启了利用RNN进行时空预测研究的新纪元.ConvLSTM通过卷积学习之前状态的空间信息,因此具备了同时提取空间特征和时间特征的能力.该方法成功地对短时雷达回波图像进行了预测,其结果比实时光流法更加准确.此后,在ConvLSTM的基础上发展了很多改进的变体结构,如Shi et al[19]引入光流轨迹的思想提出轨迹门控循环单元(Trajectory GRU,Traj GRU),可以主动学习用于重复连接的位置变化结构,进一步提高了预测的准确率. ...
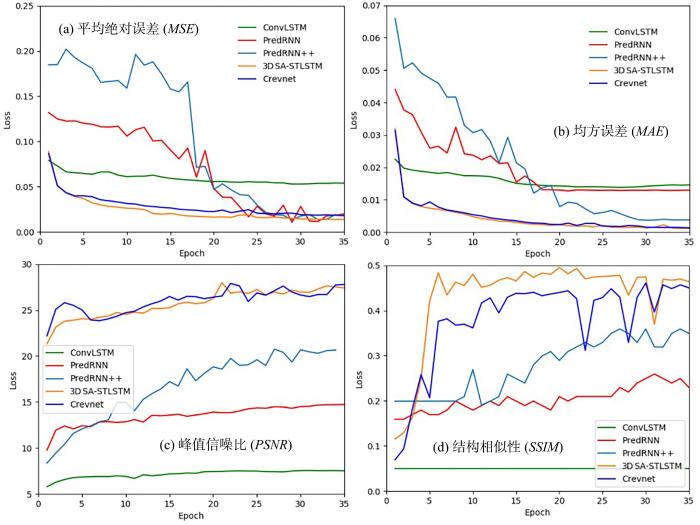
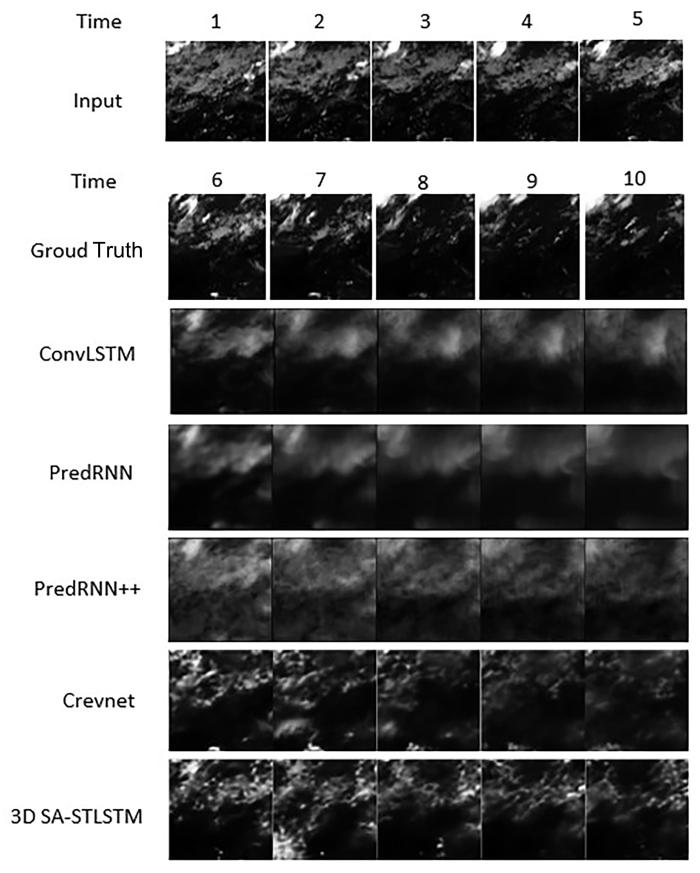
... Testing results of 3D SA⁃STLSTM and other models on satellite cloud image datasetsTable 2
Deep learning for precipitation nowcasting:A benchmark and a new model
1
2017
... Shi et al[18]在LSTM的基础上提出卷积长短期记忆神经网络(Convolutional LSTM,Conv⁃LSTM)用于预测雷达回波图,取得了良好的预测结果,开启了利用RNN进行时空预测研究的新纪元.ConvLSTM通过卷积学习之前状态的空间信息,因此具备了同时提取空间特征和时间特征的能力.该方法成功地对短时雷达回波图像进行了预测,其结果比实时光流法更加准确.此后,在ConvLSTM的基础上发展了很多改进的变体结构,如Shi et al[19]引入光流轨迹的思想提出轨迹门控循环单元(Trajectory GRU,Traj GRU),可以主动学习用于重复连接的位置变化结构,进一步提高了预测的准确率. ...
PredRNN:Recurrent neural networks for predictive learning using spatiotemporal LSTMs
2
2017
... 为了提高网络对时空特征的非线性拟合能力,LSTM常被堆叠使用,但对于简单的堆叠结构,时空信息分别沿时间步横向传递和沿堆叠层纵向传递,纵向传递的时空信息没有得到有效利用.因此,Wang et al[20]提出时空长短期记忆(Spatiotemporal LSTM,ST⁃LSTM),将纵向传递的信息连接到下一时间步,并使用额外的时空记忆单元对其进行更新和传递.Requena⁃Mesa et al[21]将生成对抗网络和LSTM网络结合起来预测卫星云图,效果不错.然而,标准LSTM单元仅使用一个输入门和一个遗忘门来完成输入信息的提取以及状态单元的遗忘和更新,往往只能提取输入信息中的部分信息对状态单元进行更新,因此输入信息中的部分有效信息可能会被丢失.Chang et al[22]提出运动感知单元(Motion⁃Aware Unit,MAU),通过有效拓宽时间感受野来提高模型在捕捉运动信息方面的表达能力.其包含两个模块,一个关注模块和一个融合模块,实验结果证明,两个模块取得了不错的效果.Gao et al[23]提出SimVP,不使用复杂的模块,如RNN,LSTM和Transformer,也不引入复杂的训练策略,如对抗性训练和课程学习.SimVP仅需CNN、跳连和MSE损失,为未来的研究提供了一种新思路. ...
... Testing results of 3D SA⁃STLSTM and other models on satellite cloud image datasetsTable 2
EarthNet2021:A large?scale dataset and challenge for Earth surface forecasting as a guided video prediction task
1
2021
... 为了提高网络对时空特征的非线性拟合能力,LSTM常被堆叠使用,但对于简单的堆叠结构,时空信息分别沿时间步横向传递和沿堆叠层纵向传递,纵向传递的时空信息没有得到有效利用.因此,Wang et al[20]提出时空长短期记忆(Spatiotemporal LSTM,ST⁃LSTM),将纵向传递的信息连接到下一时间步,并使用额外的时空记忆单元对其进行更新和传递.Requena⁃Mesa et al[21]将生成对抗网络和LSTM网络结合起来预测卫星云图,效果不错.然而,标准LSTM单元仅使用一个输入门和一个遗忘门来完成输入信息的提取以及状态单元的遗忘和更新,往往只能提取输入信息中的部分信息对状态单元进行更新,因此输入信息中的部分有效信息可能会被丢失.Chang et al[22]提出运动感知单元(Motion⁃Aware Unit,MAU),通过有效拓宽时间感受野来提高模型在捕捉运动信息方面的表达能力.其包含两个模块,一个关注模块和一个融合模块,实验结果证明,两个模块取得了不错的效果.Gao et al[23]提出SimVP,不使用复杂的模块,如RNN,LSTM和Transformer,也不引入复杂的训练策略,如对抗性训练和课程学习.SimVP仅需CNN、跳连和MSE损失,为未来的研究提供了一种新思路. ...
Mau:A motion?aware unit for video prediction and beyond
1
2021
... 为了提高网络对时空特征的非线性拟合能力,LSTM常被堆叠使用,但对于简单的堆叠结构,时空信息分别沿时间步横向传递和沿堆叠层纵向传递,纵向传递的时空信息没有得到有效利用.因此,Wang et al[20]提出时空长短期记忆(Spatiotemporal LSTM,ST⁃LSTM),将纵向传递的信息连接到下一时间步,并使用额外的时空记忆单元对其进行更新和传递.Requena⁃Mesa et al[21]将生成对抗网络和LSTM网络结合起来预测卫星云图,效果不错.然而,标准LSTM单元仅使用一个输入门和一个遗忘门来完成输入信息的提取以及状态单元的遗忘和更新,往往只能提取输入信息中的部分信息对状态单元进行更新,因此输入信息中的部分有效信息可能会被丢失.Chang et al[22]提出运动感知单元(Motion⁃Aware Unit,MAU),通过有效拓宽时间感受野来提高模型在捕捉运动信息方面的表达能力.其包含两个模块,一个关注模块和一个融合模块,实验结果证明,两个模块取得了不错的效果.Gao et al[23]提出SimVP,不使用复杂的模块,如RNN,LSTM和Transformer,也不引入复杂的训练策略,如对抗性训练和课程学习.SimVP仅需CNN、跳连和MSE损失,为未来的研究提供了一种新思路. ...
SimVP:Simpler yet better video prediction
1
2022
... 为了提高网络对时空特征的非线性拟合能力,LSTM常被堆叠使用,但对于简单的堆叠结构,时空信息分别沿时间步横向传递和沿堆叠层纵向传递,纵向传递的时空信息没有得到有效利用.因此,Wang et al[20]提出时空长短期记忆(Spatiotemporal LSTM,ST⁃LSTM),将纵向传递的信息连接到下一时间步,并使用额外的时空记忆单元对其进行更新和传递.Requena⁃Mesa et al[21]将生成对抗网络和LSTM网络结合起来预测卫星云图,效果不错.然而,标准LSTM单元仅使用一个输入门和一个遗忘门来完成输入信息的提取以及状态单元的遗忘和更新,往往只能提取输入信息中的部分信息对状态单元进行更新,因此输入信息中的部分有效信息可能会被丢失.Chang et al[22]提出运动感知单元(Motion⁃Aware Unit,MAU),通过有效拓宽时间感受野来提高模型在捕捉运动信息方面的表达能力.其包含两个模块,一个关注模块和一个融合模块,实验结果证明,两个模块取得了不错的效果.Gao et al[23]提出SimVP,不使用复杂的模块,如RNN,LSTM和Transformer,也不引入复杂的训练策略,如对抗性训练和课程学习.SimVP仅需CNN、跳连和MSE损失,为未来的研究提供了一种新思路. ...
Efficient and information?preserving future frame prediction and beyond
... 2015年Chorowski et al[26]提出注意力机制来获取机器翻译中原始序列和目标序列之间的联系,让模型能获取更长时间的信息.注意力机制实质上是人类观察事物的方式,也就是人脑会特意注重某些特殊的事物,不自觉地忽视该事物之外的其他部分.注意力机制可以给输入特征的不同部分赋予不同的权重,经过权重重新表达的输入特征更容易被提取到有效的信息.此处的权重可以看作人眼的敏锐度,即视网膜的不同部位有不同程度的信息处理能力.近几年,注意力机制被广泛应用于图像处理、自然语言处理和情感分类等多样化任务[27-28],均获得了可观的性能提升.传统ConvLSTM虽然能学习图像序列的有效时空信息并记忆特征,却无法掌握图像序列的重要部分来提取某些细节.为了解决这一问题,一些工作[29-30]尝试将注意力机制应用于LSTM或ConvLSTM以提高其序列学习性能,然而,大多数模型都将注意力机制放入外部来提取特征,将注意力机制融合进预测细胞内部的研究还不多,所以没能完全消除ConvLSTM缺少掌握细节能力的缺点.受此启发,本文设计了一种新的自注意力记忆模块,将该模块与预测单元融合,下文中称其为自注意力门.预测单元加入自注意力门后,不仅能记录历史信息,还能把控关键细节,以此来计算云图序列的哪一部分更重要,并赋予更大的权重.其具体结构如图7所示. ...
Highly accurate protein structure prediction with AlphaFold
1
2021
... 2015年Chorowski et al[26]提出注意力机制来获取机器翻译中原始序列和目标序列之间的联系,让模型能获取更长时间的信息.注意力机制实质上是人类观察事物的方式,也就是人脑会特意注重某些特殊的事物,不自觉地忽视该事物之外的其他部分.注意力机制可以给输入特征的不同部分赋予不同的权重,经过权重重新表达的输入特征更容易被提取到有效的信息.此处的权重可以看作人眼的敏锐度,即视网膜的不同部位有不同程度的信息处理能力.近几年,注意力机制被广泛应用于图像处理、自然语言处理和情感分类等多样化任务[27-28],均获得了可观的性能提升.传统ConvLSTM虽然能学习图像序列的有效时空信息并记忆特征,却无法掌握图像序列的重要部分来提取某些细节.为了解决这一问题,一些工作[29-30]尝试将注意力机制应用于LSTM或ConvLSTM以提高其序列学习性能,然而,大多数模型都将注意力机制放入外部来提取特征,将注意力机制融合进预测细胞内部的研究还不多,所以没能完全消除ConvLSTM缺少掌握细节能力的缺点.受此启发,本文设计了一种新的自注意力记忆模块,将该模块与预测单元融合,下文中称其为自注意力门.预测单元加入自注意力门后,不仅能记录历史信息,还能把控关键细节,以此来计算云图序列的哪一部分更重要,并赋予更大的权重.其具体结构如图7所示. ...
Attention?augmented machine memory
1
2021
... 2015年Chorowski et al[26]提出注意力机制来获取机器翻译中原始序列和目标序列之间的联系,让模型能获取更长时间的信息.注意力机制实质上是人类观察事物的方式,也就是人脑会特意注重某些特殊的事物,不自觉地忽视该事物之外的其他部分.注意力机制可以给输入特征的不同部分赋予不同的权重,经过权重重新表达的输入特征更容易被提取到有效的信息.此处的权重可以看作人眼的敏锐度,即视网膜的不同部位有不同程度的信息处理能力.近几年,注意力机制被广泛应用于图像处理、自然语言处理和情感分类等多样化任务[27-28],均获得了可观的性能提升.传统ConvLSTM虽然能学习图像序列的有效时空信息并记忆特征,却无法掌握图像序列的重要部分来提取某些细节.为了解决这一问题,一些工作[29-30]尝试将注意力机制应用于LSTM或ConvLSTM以提高其序列学习性能,然而,大多数模型都将注意力机制放入外部来提取特征,将注意力机制融合进预测细胞内部的研究还不多,所以没能完全消除ConvLSTM缺少掌握细节能力的缺点.受此启发,本文设计了一种新的自注意力记忆模块,将该模块与预测单元融合,下文中称其为自注意力门.预测单元加入自注意力门后,不仅能记录历史信息,还能把控关键细节,以此来计算云图序列的哪一部分更重要,并赋予更大的权重.其具体结构如图7所示. ...
基于注意力机制的LSTM的语义关系抽取
1
2018
... 2015年Chorowski et al[26]提出注意力机制来获取机器翻译中原始序列和目标序列之间的联系,让模型能获取更长时间的信息.注意力机制实质上是人类观察事物的方式,也就是人脑会特意注重某些特殊的事物,不自觉地忽视该事物之外的其他部分.注意力机制可以给输入特征的不同部分赋予不同的权重,经过权重重新表达的输入特征更容易被提取到有效的信息.此处的权重可以看作人眼的敏锐度,即视网膜的不同部位有不同程度的信息处理能力.近几年,注意力机制被广泛应用于图像处理、自然语言处理和情感分类等多样化任务[27-28],均获得了可观的性能提升.传统ConvLSTM虽然能学习图像序列的有效时空信息并记忆特征,却无法掌握图像序列的重要部分来提取某些细节.为了解决这一问题,一些工作[29-30]尝试将注意力机制应用于LSTM或ConvLSTM以提高其序列学习性能,然而,大多数模型都将注意力机制放入外部来提取特征,将注意力机制融合进预测细胞内部的研究还不多,所以没能完全消除ConvLSTM缺少掌握细节能力的缺点.受此启发,本文设计了一种新的自注意力记忆模块,将该模块与预测单元融合,下文中称其为自注意力门.预测单元加入自注意力门后,不仅能记录历史信息,还能把控关键细节,以此来计算云图序列的哪一部分更重要,并赋予更大的权重.其具体结构如图7所示. ...
Semantic relation extraction of LSTM based on attention mechanism
1
2018
... 2015年Chorowski et al[26]提出注意力机制来获取机器翻译中原始序列和目标序列之间的联系,让模型能获取更长时间的信息.注意力机制实质上是人类观察事物的方式,也就是人脑会特意注重某些特殊的事物,不自觉地忽视该事物之外的其他部分.注意力机制可以给输入特征的不同部分赋予不同的权重,经过权重重新表达的输入特征更容易被提取到有效的信息.此处的权重可以看作人眼的敏锐度,即视网膜的不同部位有不同程度的信息处理能力.近几年,注意力机制被广泛应用于图像处理、自然语言处理和情感分类等多样化任务[27-28],均获得了可观的性能提升.传统ConvLSTM虽然能学习图像序列的有效时空信息并记忆特征,却无法掌握图像序列的重要部分来提取某些细节.为了解决这一问题,一些工作[29-30]尝试将注意力机制应用于LSTM或ConvLSTM以提高其序列学习性能,然而,大多数模型都将注意力机制放入外部来提取特征,将注意力机制融合进预测细胞内部的研究还不多,所以没能完全消除ConvLSTM缺少掌握细节能力的缺点.受此启发,本文设计了一种新的自注意力记忆模块,将该模块与预测单元融合,下文中称其为自注意力门.预测单元加入自注意力门后,不仅能记录历史信息,还能把控关键细节,以此来计算云图序列的哪一部分更重要,并赋予更大的权重.其具体结构如图7所示. ...
Long short?term memory neural network (LSTM?NN) for aquifer level time series forecasting using in?situ piezometric observations
1
2021
... 2015年Chorowski et al[26]提出注意力机制来获取机器翻译中原始序列和目标序列之间的联系,让模型能获取更长时间的信息.注意力机制实质上是人类观察事物的方式,也就是人脑会特意注重某些特殊的事物,不自觉地忽视该事物之外的其他部分.注意力机制可以给输入特征的不同部分赋予不同的权重,经过权重重新表达的输入特征更容易被提取到有效的信息.此处的权重可以看作人眼的敏锐度,即视网膜的不同部位有不同程度的信息处理能力.近几年,注意力机制被广泛应用于图像处理、自然语言处理和情感分类等多样化任务[27-28],均获得了可观的性能提升.传统ConvLSTM虽然能学习图像序列的有效时空信息并记忆特征,却无法掌握图像序列的重要部分来提取某些细节.为了解决这一问题,一些工作[29-30]尝试将注意力机制应用于LSTM或ConvLSTM以提高其序列学习性能,然而,大多数模型都将注意力机制放入外部来提取特征,将注意力机制融合进预测细胞内部的研究还不多,所以没能完全消除ConvLSTM缺少掌握细节能力的缺点.受此启发,本文设计了一种新的自注意力记忆模块,将该模块与预测单元融合,下文中称其为自注意力门.预测单元加入自注意力门后,不仅能记录历史信息,还能把控关键细节,以此来计算云图序列的哪一部分更重要,并赋予更大的权重.其具体结构如图7所示. ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}