基于自适应高斯⁃牛顿迭代三步延迟时空融合的无人机测高
Altitude measurement of UAV based on adaptive Gauss⁃Newton iterative three⁃step delay space⁃time fusion
基于自适应高斯⁃牛顿迭代三步延迟时空融合的无人机测高 |
| 黄鹤, 谢飞宇, 王珺, 王会峰, 杨澜, 茹锋 |
|
Altitude measurement of UAV based on adaptive Gauss⁃Newton iterative three⁃step delay space⁃time fusion |
| He Huang, Feiyu Xie, Jun Wang, Huifeng Wang, Lan Yang, Feng Ru |
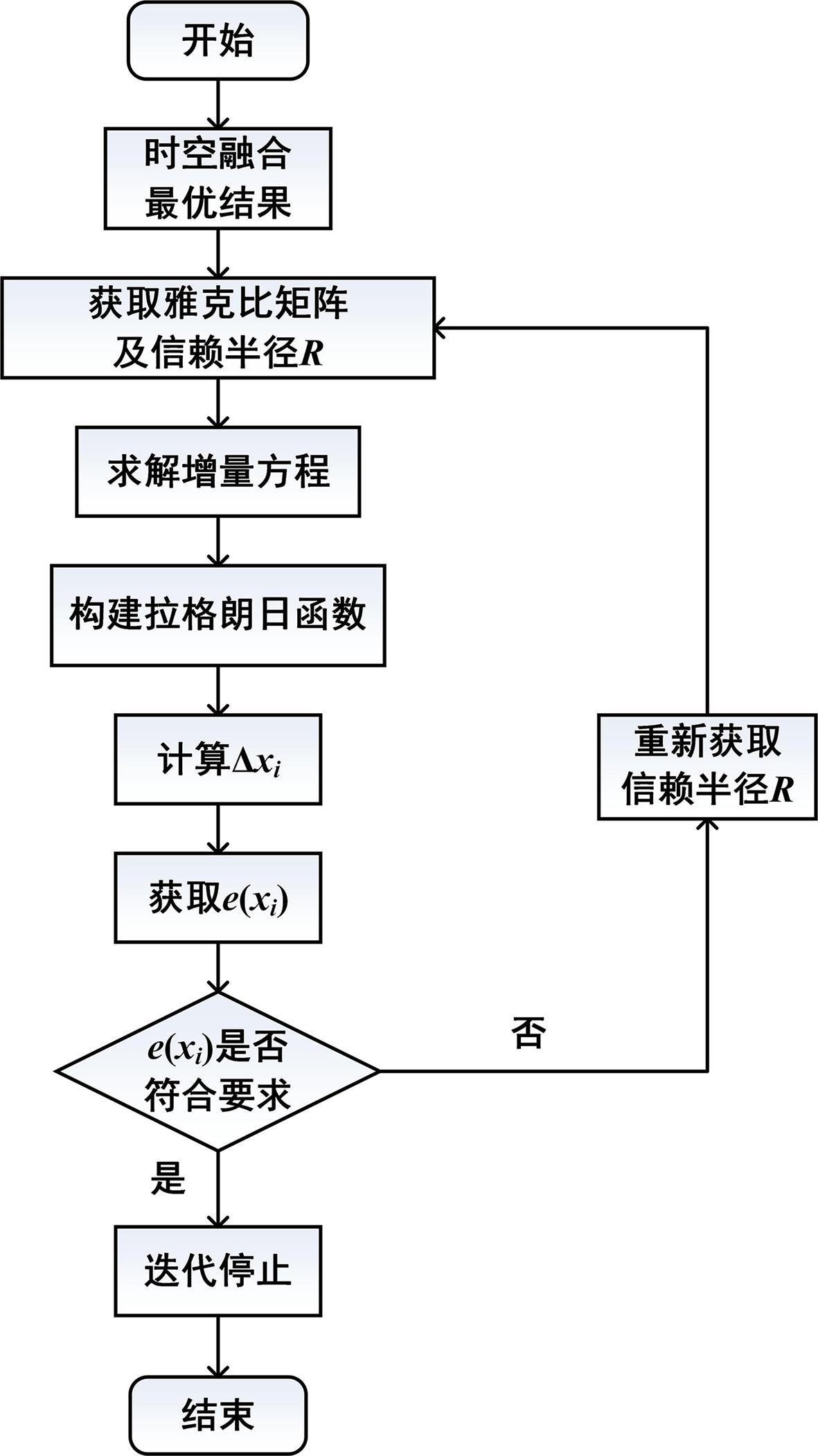
| 图4 自适应高斯?牛顿法流程图 |
| Fig.4 Flowchart of the adaptive Gauss?Newton method |
|
|