非接触式、远距离场景下的人体生命体征检测是目前研究的热点,在地震救灾、健康检测等领域有广泛应用.毫米波雷达因其频带宽、波束窄、分辨率高、便于携带等特点,常用于生命体征探测.同时毫米波信号在空气中传播衰减小,可穿透衣物、废墟等非金属材料,在面对身体严重烧伤或烫伤、有传染性疾病以及重度感染时进行非接触生命探测和健康监视更具有优势[1 ] .
经验模态分解(Empirical Mode Decomposition,EMD)和变分模态分解(Variational Mode Decomposition,VMD)是常用的生命体征信号分离方法.EMD方法无严格的数学理论基础,存在模式混叠问题.2009年EEMD(Ensemble Empirical Mode Decomposition)方法被提出[2 -3 ] ,改善了EMD分解中的模式混叠问题.针对EEMD方法噪声去除不完全的问题,CEEMD(Complete Ensemble Empirical Mode Decomposition)方法在2011年被提出[4 ] .Dragomiretskiy and Zosso[5 ] 提出的VMD方法是一种完全非递归的信号分解算法,相较于EMD算法分解过程中模态分量个数的不确定性,VMD方法可人为规定模态分解个数[6 ] .VMD方法的模态个数确定具有主观性,影响了信号分解的可靠性,针对VMD方法可靠性低的问题,本文提出了改进的VMD方法,该方法可自适应确定所分解的模态分量个数.
本文首先分析了人体生命信号特征及调频连续波雷达原理,利用AWR1642EVM毫米波雷达开发平台获得被测目标回波信号并进行信号预处理,最后对仿真信号和实测信号进行算法验证.针对毫米波雷达获得的目标静态生命体征信号,本文主要研究呼吸和心跳频率的提取.实验结果表明,本方法解决了VMD的不可靠性,避免了人工设置模态个数产生的误差,比EMD分离出的呼吸和心跳信号更纯净.
1 毫米波雷达检测信号理论基础
1.1 人体体征信号特点
本文将生命体征活动近似看作由呼吸和心跳共同引起的胸腔表面的位移振动[7 ] .在目标平静时,健康成年人心跳次数一般为每分钟60~100次,在运动过程中,心率比平时速度快.对于呼吸频率,普通成年人的呼吸频率为每分钟12~20次.表1 为成人体征信号相关指标,从表中可看出人体生命信号是微弱和低速的运动信号.
生命信号一般包括心跳信号、呼吸信号以及背景噪声,心跳和呼吸信号可近似看作频率稳定的正弦波信号[8 ] ,生命信号可由式(1)表示:
x ( t ) = A h s i n 2 π f h t + φ h + A b s i n 2 π f b t + φ b + z (1)
其中,A h 为心跳信号振幅,f h 为心跳信号频率,A b 为呼吸信号振幅,f b 为呼吸信号频率,z 为噪声.
1.2 FMCW雷达工作原理
毫米波FMCW雷达连续发射的线性调频脉冲信号为s t
s t = e j 2 π f c t + π B T t 2 (2)
其中,f c B 为雷达调制带宽,T 为线性调频脉冲信号持续时间.
与雷达间隔R 处某单一目标接收到电磁波并反射回波,雷达与目标间存在传播距离,传播过程中产生t d r t
r t = e j 2 π f c t - t d + π B T t - t d 2 (3)
将发射信号s t r t b t 式(4)所示:
b t = s t r t = e j 2 π B t d T t + 2 π f c t d - π B T t d 2 (4)
r t t d = 2 R c t d 2 式(5)所示:
b t ≈ e j 4 π B R c T t + 4 π λ R = e j f b t + ϕ b (5)
其中,频率f b = 4 π B R c T ϕ b = 4 π R λ λ 为波长.
由式(5)可看出,差频信号相位部分ϕ b R 为线性关系,目标的极小位移会引起相位的较大变化,为了测量小尺度振动,在目标距离单元测量FMCW信号随时间的相位变化[9 ] .连续测量值的相位随物体移动距离ΔR 的变化如式(6)所示.可以看出,相位变化很好地描述了目标微小位移,如当λ = 4 m m Δ R = 1 m m Δ ϕ b = π .
Δ ϕ b = 4 π λ Δ R (6)
2 信号预处理
2.1 动目标检测
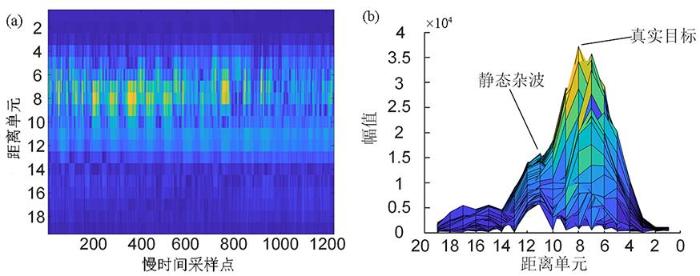
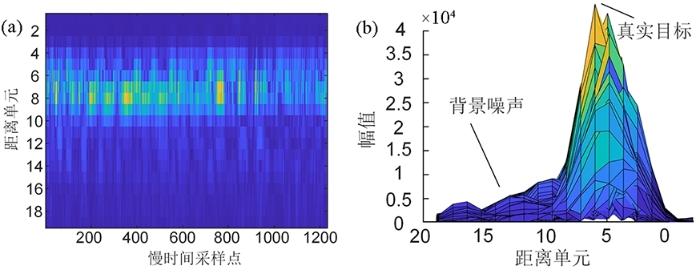
在实际测量中,有许多静止分量的干扰信号,当这些干扰信号能量高于待检测目标能量时,真实目标被淹没,检测结果会发生严重偏差,甚至无法正确提取人体生命信号.本节采用动目标检测方法,主要利用脉冲去除静态杂波分量.在雷达回波中,每个脉冲的干扰成分相同,运动目标相对雷达的距离变化会引起相位改变.前后脉冲对消,可滤除信号中的静止杂波分量,留下运动目标分量.将原始矩阵每行的每个数减去该行的平均值,得到原始信号滤除静止杂波分量后的数据,该矩阵去除了静止杂波分量,保留了运动信息.实验结果见图1 和图2 .
图1
图1
原始雷达回波信号
(a)回波脉冲三维距离像;(b)回波脉冲二维距离像
Fig.1
Raw radar echo
图2
图2
去除静态杂波后的雷达回波信号
(a)回波脉冲三维距离像;(b)回波脉冲二维距离像
Fig.2
Radar echo signal after removing static clutter
图1 为原始雷达回波的距离像,可以看出静态杂波分量比较强.图2 为雷达回波信号经过动目标检测后的距离像,可看出静态杂波得到明显抑制.
2.2 距离门切换
从图2 可知,提取目标所在距离单元位置是通过距离单元能量确定的.实验中,目标胸壁起伏、轻微人体位移等均会导致距离单位的跳变,导致结果存在误差甚至错误.本节通过距离门切换解决上述问题.在实验中由于人体轻微晃动有可能使距离门改变,从而引起实验误差.为了更准确地计算,本文采用滑动窗口确定能量最大的距离单元.选择窗长为N 个点,滑窗的步进长度为M 个点(慢时间采样频率为M Hz),可用此方法来每秒计算目标实时距离单元.
每个滑窗内的数据为k × N k 为距离单元个数.由式(7)可计算出该滑窗内能量最大的距离门,即求此滑窗内所有慢时间采样值的平方和,Rn,i 是经过MTI后数据矩阵的第n 行i 列值,n 为距离门位置,i 为窗内慢时间采样点位置.如此可计算滑窗内每个距离门的能量值,取最大值为滑窗能量最大距离门,此距离门即被测对象距离雷达系统距离.
E n = ∑ i = 1 N R n , i 2 (7)
对所有数据进行步进滑窗,可得能量最大距离门组.取距离门组中的众数,看作整个实验中能量最大距离门,若目标不动,可将此距离门中信息作为后续携带人体生命体征信号.
2.3 相位信号处理
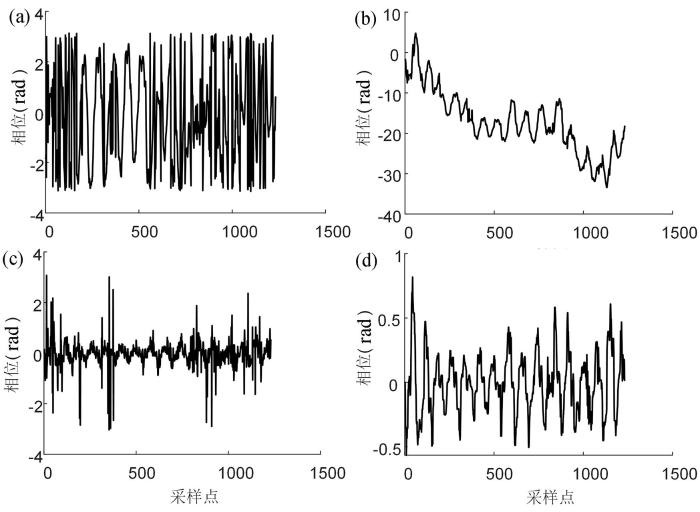
对经过距离门切换得到目标信号并提取其相位信息,如图3 a所示.由于相位值在- π , π 图3 b的波形.心跳信号比呼吸信号的能量小,因此需对解缠绕后的相位进行差分运算来增强心跳信号.从图3 c可明显看出存在脉冲噪声,中值滤波算法简单,可有效抑制脉冲噪声,保护信号边缘不被模糊,因此可用于消除脉冲噪声[9 -10 ] ,结果如图3 d所示.
图3
图3
相位处理波形
(a)相位展开前;(b)相位展开后;(c)相位展开差分后;
(d)相位展开差分中值滤波后
Fig.3
Phase processing waveform
3 生命体征信号分离
3.1 VMD方法
EMD方法在研究瞬时频率时,提出了本征模态函数(Intrinsic Mode Function,IMF)的概念,是一种将信号分解为一组IMF的方法,其核心是得到一组IMF分量[11 ] .EMD算法存在很多局限性,总结如下:
(1)EMD是一种根据经验分解信号的算法,在计算过程中没有严格的数学理论基础;
针对EMD方法存在的上述缺点,提出VMD算法代替EMD算法处理信号.该算法的目的是将原始数据分解为k 个模态分量u k t ωk 附近,存在一定的带宽.这样就将问题转化为使所有模态分量的带宽和最小,VMD算法根据经验规定IMF个数.设需要分解模态分量个数为k ,分解具体步骤如下[12 ] :
δ t + j π t * u k t (8)
(2)将每个模态经过希尔伯特变换后的频谱搬移至基带:
δ t + j π t * u k t e - j ω k t (9)
(3)计算式(9)信号梯度平方的L 2 范数来估计每个IMF的带宽,受约束的变分问题如下式:
m i n u k , ω k ∑ k ∂ t δ t + j π t * u k t e - j ω k t 2 2 s . t . ∑ k u k = f (10)
其中,u k t ωk 是模态对应的中心频率.
为不受约束,使用二次惩罚因子α 和拉格朗日乘子λ t . 增广拉格朗日如下:
L u k , ω k , λ : = α ∑ k t δ t + j π t * u k t e - j ω k t 2 2 + f t - ∑ k u k t 2 2 + λ t , f t - ∑ k u k t (11)
利用交替方向乘子法(ADMM)解决变分问题,通过更新u k n + 1 ω k n + 1 λ n + 1 u k n + 1 ω ω k n + 1 ω
(1)初始化参数:初始化u k 1 ω k 1 λ 1 n 初始化为0;
(2)利用下式对IMF从1到k 更新uk 和ωk :
u k n + 1 ω = f ω - ∑ i < k u i n + 1 ω - ∑ i > k u i n ω + λ n ω 2 1 + 2 α ω - ω n k 2 (12)
ω k n + 1 = ∫ 0 ∞ ω u k n + 1 ω 2 d ω ∫ 0 ∞ u k n + 1 ω 2 d ω (13)
λ n + 1 ω = λ n ω + τ f ω - ∑ k u k n + 1 ω (14)
∑ k u k n + 1 - u k n 2 2 u k n 2 2 < ε (15)
其中,ε = 10 - 6 . 若收敛则循环停止,得到IMF,若不收敛,则返回第二步,并重复上述步骤.
3.2 改进VMD
与EMD算法分解过程中IMF个数的不确定性比较,VMD算法可人为规定IMF的个数,该个数根据经验规定.当规定的分解模态数量过小,会导致欠分解;若规定的分解模态数量过大,则会导致过分解.因此本节采用改进VMD算法确定分解模态的数量[13 ] .
互相关系数是表征两个信号相关程度的量.当两信号相关程度越高,则它们的互相关系数值越大[14 -15 ] .当分解的IMF数量最优时,利用VMD对信号分解后的余量是噪声,余量与IMF互不相关[16 ] .因此,本文采用余量与IMF叠加信号的互相关系数确定最优IMF的数量,互相关系数值越小,选取的值越优.设信号经过VMD分解后的余量为m n f n
ρ k = R m f k R f f 0 R m m 0 = ∑ n = 0 N f n c n - k R f f 0 R m m 0 (16)
其中,R m f k N 为序列长度,k 为时间差,R m m 0 R f f 0 k = 1
ρ m = R m f 1 R f f 0 R m m 0 (17)
4 结果与分析
4.1 仿真信号分离算法比较
由1.1节人体体征信号特点,可建模人体生命信号.呼吸和心跳信号近似看作正弦信号,为便于分析,本节采用正弦函数建模呼吸和心跳信号.设定心跳频率为1.1 Hz、呼吸频率为0.3 Hz.由于心跳信号幅度比呼吸信号幅度微弱很多,所以设心跳信号振幅为0.001 m,呼吸信号振幅为0.01 m,即:
y b t = A b s i n 2 π ⋅ f b ⋅ t (18)
y h t = A h s i n 2 π ⋅ f h ⋅ t (19)
实际测量中存在噪声,因此人为加入信噪比为10 dB的高斯白噪声.仿真建模信号时域波形如图4 所示;添加信噪比为10 dB的高斯白噪声的合成信号时域波形如图5 所示.
图4
图4
建模呼吸信号时域波形图
(a)建模呼吸信号;(b)建模心跳信号
Fig.4
Modeling respiratory signal time domain waveform
图5
图5
合成信号时域图
Fig.5
Synthetic signal time domain plot
从图4 和图5 可看出,合成信号波形接近呼吸信号波形,是由于呼吸信号振幅远大于心跳信号振幅,对合成信号添加高斯白噪声,使仿真信号更接近真实值.
对上面建模得到的单人合成生命体征信号用EMD和VMD算法分离信号,得到的结果如图6 和图7 所示.
图6
图6
EMD分离结果
Fig.6
EMD separation results
图7
图7
VMD分离结果
Fig.7
VMD separation results
EMD算法分离结果如图6 所示,由图可见,IMF1是无用的噪声信号,IMF2中包含了心跳信号频率,IMF3包含了呼吸信号频率.
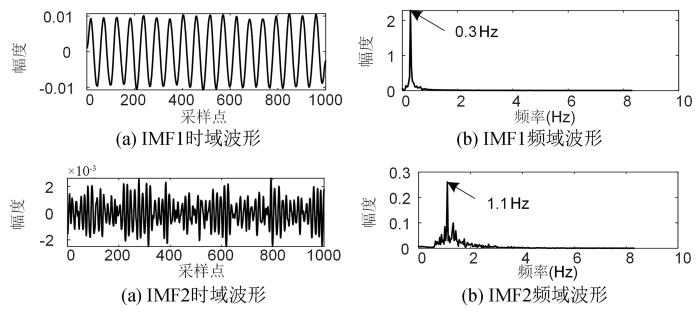
下面讨论用VMD算法分离呼吸和心跳信号.因为建模信号仅有呼吸和心跳信号频率,因此将所需分离模态个数k τ = 0 α = 900 ε = 10 - 7 图7 所示.图7 a和图7 b分别为IMF1的时域波形和频域波形,由频域波形可看出分离的信号频率为0.3 Hz,即呼吸信号;图7 c和图7 d为IMF2的时域波形和频域波形,可看到IMF2信号为频率1.1 Hz的心跳信号.由图7 的VMD分离结果可明显看出,仿真信号中的呼吸和心跳信号被成功分离,时域波形振幅虽与原信号存在差异,但不影响结果,分离出的呼吸和心跳信号频率正确.
对比图6 和图7 ,VMD算法和EMD算法相比,可以分离出更真实的呼吸和心跳信号.EMD算法分离的IMF数量是不定的,需要迭代至条件不满足退出循环,由于IMF数量的不确定性,对分解后的数据处理影响较大,若不观察分解结果,无法确定呼吸和心跳信号与IMF分量的对应关系,VMD算法可以人为设定分解IMF的个数,在该仿真实验中IMF数量设置为2,呼吸和心跳分量分别对应IMF1和IMF2.
4.2 实测信号测试
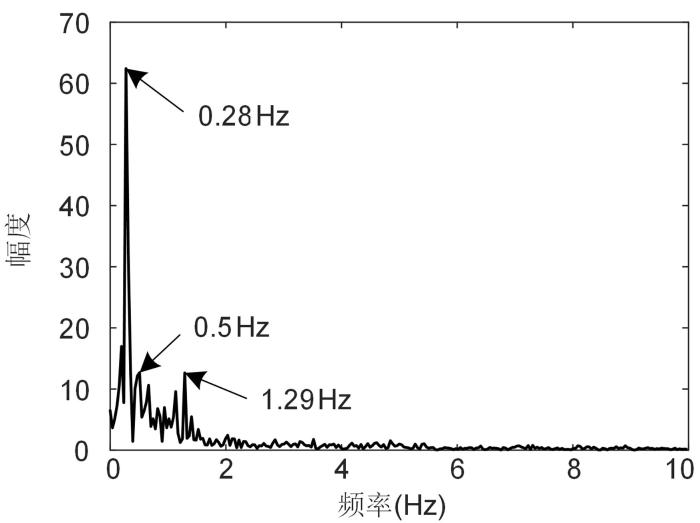
本节通过实际测量信号验证改进VMD算法对确定分解模态数量的可行性.采用德州仪器(TI)公司的AWR1642毫米波雷达开发平台,被测目标为一名成年女性呈坐姿平静状态接受检测.雷达发射FMCW波,遇到目标后反射回波信号,对获得信号进行距离FFT,通过距离门切换确定目标所在距离单元,进行相位提取、解缠绕、差分运算及中值滤波,处理后的相位信号幅频图见图8 ,AWR1642参数见表2 .
图8
图8
处理后的相位信号幅频图
Fig.8
Amplitude⁃frequency diagram of the processed phase signal
对实际测量的目标信号进行VMD分解,根据生命体征信号特点,设定分解IMF数量k 依次为2,3,4,不同k 值的余量与模式重构信号归一化互相关系数如表3 所示.从表中可看出k =3时,归一化互相关系数为最小值,从图8 中可看出实测信号有三个谱峰,因此采用互相关系数法确定的模式数量与实际结果一致.
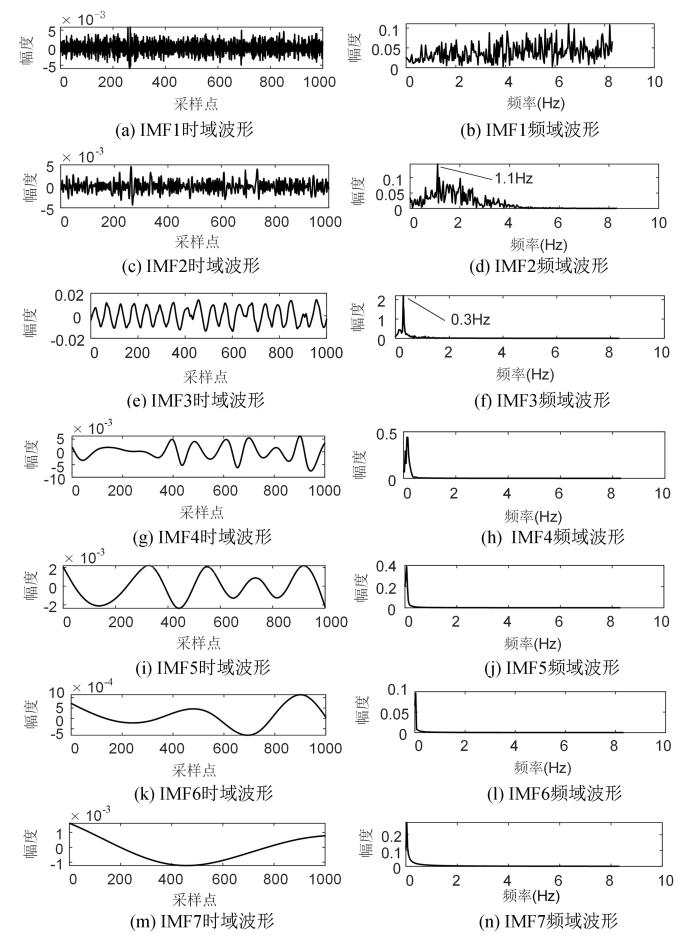
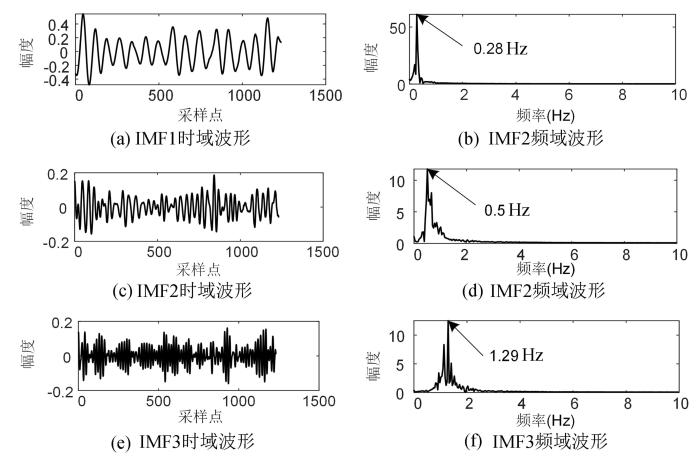
对该实测信号进行k = 3 图9 .VMD对信号进行分解后,IMF1频率为0.28 Hz,对应呼吸信号频率,IMF2频率为0.5 Hz,对应呼吸谐波信号频率,IMF3频率为1.29 Hz,对应心跳信号频率,实验结果表明改进VMD方法可有效估计模态分解数量.
图9
图9
VMD分离后各模式时域及频域波形
Fig.9
Time⁃domain and frequency⁃domain waveforms of each mode after VMD separation
5 结论
本文基于毫米波雷达对生命体征进行检测,针对VMD算法分解模态个数需人为设定的缺点,提出了改进VMD分解算法提取呼吸和心跳信号频率.通过仿真和实测实验结果验证,结论如下:
(1)仿真数据实验表明:在已知信号成分数量时,EMD算法模态分解个数不确定,容易产生模态混叠,VMD算法可以避免EMD方法发生的模态混叠,可以分离出更真实的呼吸和心跳信号,得到人体呼吸和心跳频率.
(2)提出一种基于互相关函数法确定模态分解个数的方法,对实际测量的数据进行算法验证,结果表明:本文方法避免了VMD方法按经验选取模态个数产生结果误差的缺点.
参考文献
View Option
[1]
Chen K M Misra D Wang H et al An x⁃band microwave life⁃detection system
IEEE Transactions on Biomedical Engineering ,1986 ,BME⁃33 (7 ):697 -701 .
[本文引用: 1]
[2]
Wu Z Huang N E Ensemble empirical mode decomposition:A noise⁃assisted data analysis method
Advances in Adaptive Data Analysis ,2009 (1 ):1 -41 .
[本文引用: 1]
[3]
[本文引用: 1]
Wang H Narayanan R M Zhou Z O et al Micro⁃Doppler characteristics analysis of mobing target of penetrating radar based on improved EEMD
Journal of Electronics and Information ,2010 (6 ),DOI:10.3724/SP.J.1146.2009.00899 .
[本文引用: 1]
[4]
Torres M E Colominas M A Schlotthauer G et al A complete ensemble empirical mode decomposition with adaptive noise
∥Proceedings of IEEE International Conference on Acoustics,Speech,and Signal Processing . Prague,Czech Republic :IEEE ,2011 :ISBN 978⁃1 ⁃4577 .
[本文引用: 1]
[5]
Dragomiretskiy K Zosso D Variational mode decomposition
IEEE Transactions on Signal Processing ,2014 ,62 (3 ):531 -533 .
[本文引用: 1]
[6]
安美晨 ,王鹏 ,蔡超 ,等 静息态下基于变分模态分解的生命体征检测
.计算机工程与应用 ,2022 ,58 (9 ):288 -293 .
[本文引用: 1]
An M C Wang P Cai C et al Vital signs detection based on variational modal decomposition in resting state
Computer Engineering and Applications ,2022 ,58 (9 ):288 -293 .
[本文引用: 1]
[7]
文乐 ,方晖 ,张兴敢 基于MUSIC算法的生命探测雷达信号处理方法
南京大学学报(自然科学) ,2016 ,52 (5 ):946 -952 .
[本文引用: 1]
Wen L Fang H Zhang X G Signal processing for life detection radar based on MUSIC algorithm
Nanjing University (Natural Sciences) ,2016 ,52 (5 ):946 -952 .
[本文引用: 1]
[8]
付瑞玲 生物雷达信号处理算法研究
.硕士学位论文 .郑州 :郑州大学 ,2011 .
[本文引用: 1]
Fu R L Algorithm research for signal processing on bioradar . Master Dissertation. Zhenzhou :Zhenzhou University ,2011 .
[本文引用: 1]
[9]
吴志军 ,韦金宜 ,黄李波 ,等 基于调频连续波雷达的多目标生命体征实时检测
.传感器与微系统 ,2021 ,40 (3 ):112 -115 ,119 .
[本文引用: 2]
Wu Z J Wei J Y Huang L B et al Realtime multi⁃target vital signs detection based on FMCW radar
Transducer and Microsystem Technologies ,2021 ,40 (3 ):112 -115 ,119 .
[本文引用: 2]
[10]
马炼 ,李林 一种针对椒盐噪声的高速自适应中值滤波算法
.计算机时代 ,2021 (10 ):68 -71 .
[本文引用: 1]
Ma L Li L A high speed adaptive median filtering algorithm for salt and pepper noise removing
Computer Era ,2021 (10 ):68 -71 .
[本文引用: 1]
[11]
Rilling G Flandrin P One or two frequencies? The empirical mode decomposition answers. IEEE Transactions on Signal Processing :A publication of the IEEE Signal Processing Society ,2008 ,56 (1 ):85 -95 .
[本文引用: 1]
[12]
姜万录 ,王振威 ,朱勇 ,等 基于VMD消噪处理的滚动轴承早期故障识别
.液压与气动 ,2017 (5 ):13 -20 .
[本文引用: 1]
Jiang W L Wang Z W Zhu Y et al VMD denoising processing⁃based early fault recognition method of rolling bearings
.Hydraulic and Pneumatic ,2017 (5 ):13 -20 .
[本文引用: 1]
[13]
汪春华 ,冯焱侠 基于VMD⁃维纳滤波的时间序列去噪
.自动化技术与应用 ,2022 ,41 (1 ):9 -13 .
[本文引用: 1]
Wang C H Feng Y X Time series denoising based on VMD wiener filter
Techniques of Autocmation and Applications ,2022 ,41 (1 ):9 -13 .
[本文引用: 1]
[14]
肖倩 ,王建辉 ,方晓柯 ,等 一种基于互相关函数的小波系数相关阈值去噪方法
.东北大学学报(自然科学版) ,2011 ,32 (3 ):318 -321 .
[本文引用: 1]
Xiao Q Wang J H Fang X K et al A wavelet coefficient threshold denoising method based on a cross⁃correlation function
Journal of Northeastern University (Natural Scien⁃ces) ,2011 ,32 (3 ):318 -321 .
[本文引用: 1]
[15]
苗友忠 ,罗玮 ,刘兆辉 ,等 基于互相关函数和矩阵束算法的电力系统低频振荡在线辨识
.电力系统及其自动化学报 ,2015 ,27 (12 ):97 -102 .
[本文引用: 1]
Miao Y Z Luo W Liu Z H et al Power system low frequency oscillation online identification based on CCF⁃MP
Proceedings of the CSU⁃EPSA ,2015 ,27 (12 ):97 -102 .
[本文引用: 1]
[16]
冯焱侠 稳健多维自回归短期电力负荷预测方法研究 .硕士学位论文.西安 :西安理工大学 ,2020 .
[本文引用: 1]
Feng Y X Research on short⁃term load forecasting method based on robust multidimensional autoregression
Master Dissertation . Xi'an :Xi'an University of Technology ,2020 .
[本文引用: 1]
An x?band microwave life?detection system
1
1986
... 非接触式、远距离场景下的人体生命体征检测是目前研究的热点,在地震救灾、健康检测等领域有广泛应用.毫米波雷达因其频带宽、波束窄、分辨率高、便于携带等特点,常用于生命体征探测.同时毫米波信号在空气中传播衰减小,可穿透衣物、废墟等非金属材料,在面对身体严重烧伤或烫伤、有传染性疾病以及重度感染时进行非接触生命探测和健康监视更具有优势[1 ] . ...
Ensemble empirical mode decomposition:A noise?assisted data analysis method
1
2009
... 经验模态分解(Empirical Mode Decomposition,EMD)和变分模态分解(Variational Mode Decomposition,VMD)是常用的生命体征信号分离方法.EMD方法无严格的数学理论基础,存在模式混叠问题.2009年EEMD(Ensemble Empirical Mode Decomposition)方法被提出[2 -3 ] ,改善了EMD分解中的模式混叠问题.针对EEMD方法噪声去除不完全的问题,CEEMD(Complete Ensemble Empirical Mode Decomposition)方法在2011年被提出[4 ] .Dragomiretskiy and Zosso[5 ] 提出的VMD方法是一种完全非递归的信号分解算法,相较于EMD算法分解过程中模态分量个数的不确定性,VMD方法可人为规定模态分解个数[6 ] .VMD方法的模态个数确定具有主观性,影响了信号分解的可靠性,针对VMD方法可靠性低的问题,本文提出了改进的VMD方法,该方法可自适应确定所分解的模态分量个数. ...
基于改进EEMD的穿墙雷达动目标微多普勒特性分析
1
... 经验模态分解(Empirical Mode Decomposition,EMD)和变分模态分解(Variational Mode Decomposition,VMD)是常用的生命体征信号分离方法.EMD方法无严格的数学理论基础,存在模式混叠问题.2009年EEMD(Ensemble Empirical Mode Decomposition)方法被提出[2 -3 ] ,改善了EMD分解中的模式混叠问题.针对EEMD方法噪声去除不完全的问题,CEEMD(Complete Ensemble Empirical Mode Decomposition)方法在2011年被提出[4 ] .Dragomiretskiy and Zosso[5 ] 提出的VMD方法是一种完全非递归的信号分解算法,相较于EMD算法分解过程中模态分量个数的不确定性,VMD方法可人为规定模态分解个数[6 ] .VMD方法的模态个数确定具有主观性,影响了信号分解的可靠性,针对VMD方法可靠性低的问题,本文提出了改进的VMD方法,该方法可自适应确定所分解的模态分量个数. ...
Micro?Doppler characteristics analysis of mobing target of penetrating radar based on improved EEMD
1
... 经验模态分解(Empirical Mode Decomposition,EMD)和变分模态分解(Variational Mode Decomposition,VMD)是常用的生命体征信号分离方法.EMD方法无严格的数学理论基础,存在模式混叠问题.2009年EEMD(Ensemble Empirical Mode Decomposition)方法被提出[2 -3 ] ,改善了EMD分解中的模式混叠问题.针对EEMD方法噪声去除不完全的问题,CEEMD(Complete Ensemble Empirical Mode Decomposition)方法在2011年被提出[4 ] .Dragomiretskiy and Zosso[5 ] 提出的VMD方法是一种完全非递归的信号分解算法,相较于EMD算法分解过程中模态分量个数的不确定性,VMD方法可人为规定模态分解个数[6 ] .VMD方法的模态个数确定具有主观性,影响了信号分解的可靠性,针对VMD方法可靠性低的问题,本文提出了改进的VMD方法,该方法可自适应确定所分解的模态分量个数. ...
A complete ensemble empirical mode decomposition with adaptive noise
1
2011
... 经验模态分解(Empirical Mode Decomposition,EMD)和变分模态分解(Variational Mode Decomposition,VMD)是常用的生命体征信号分离方法.EMD方法无严格的数学理论基础,存在模式混叠问题.2009年EEMD(Ensemble Empirical Mode Decomposition)方法被提出[2 -3 ] ,改善了EMD分解中的模式混叠问题.针对EEMD方法噪声去除不完全的问题,CEEMD(Complete Ensemble Empirical Mode Decomposition)方法在2011年被提出[4 ] .Dragomiretskiy and Zosso[5 ] 提出的VMD方法是一种完全非递归的信号分解算法,相较于EMD算法分解过程中模态分量个数的不确定性,VMD方法可人为规定模态分解个数[6 ] .VMD方法的模态个数确定具有主观性,影响了信号分解的可靠性,针对VMD方法可靠性低的问题,本文提出了改进的VMD方法,该方法可自适应确定所分解的模态分量个数. ...
Variational mode decomposition
1
2014
... 经验模态分解(Empirical Mode Decomposition,EMD)和变分模态分解(Variational Mode Decomposition,VMD)是常用的生命体征信号分离方法.EMD方法无严格的数学理论基础,存在模式混叠问题.2009年EEMD(Ensemble Empirical Mode Decomposition)方法被提出[2 -3 ] ,改善了EMD分解中的模式混叠问题.针对EEMD方法噪声去除不完全的问题,CEEMD(Complete Ensemble Empirical Mode Decomposition)方法在2011年被提出[4 ] .Dragomiretskiy and Zosso[5 ] 提出的VMD方法是一种完全非递归的信号分解算法,相较于EMD算法分解过程中模态分量个数的不确定性,VMD方法可人为规定模态分解个数[6 ] .VMD方法的模态个数确定具有主观性,影响了信号分解的可靠性,针对VMD方法可靠性低的问题,本文提出了改进的VMD方法,该方法可自适应确定所分解的模态分量个数. ...
静息态下基于变分模态分解的生命体征检测
1
2022
... 经验模态分解(Empirical Mode Decomposition,EMD)和变分模态分解(Variational Mode Decomposition,VMD)是常用的生命体征信号分离方法.EMD方法无严格的数学理论基础,存在模式混叠问题.2009年EEMD(Ensemble Empirical Mode Decomposition)方法被提出[2 -3 ] ,改善了EMD分解中的模式混叠问题.针对EEMD方法噪声去除不完全的问题,CEEMD(Complete Ensemble Empirical Mode Decomposition)方法在2011年被提出[4 ] .Dragomiretskiy and Zosso[5 ] 提出的VMD方法是一种完全非递归的信号分解算法,相较于EMD算法分解过程中模态分量个数的不确定性,VMD方法可人为规定模态分解个数[6 ] .VMD方法的模态个数确定具有主观性,影响了信号分解的可靠性,针对VMD方法可靠性低的问题,本文提出了改进的VMD方法,该方法可自适应确定所分解的模态分量个数. ...
Vital signs detection based on variational modal decomposition in resting state
1
2022
... 经验模态分解(Empirical Mode Decomposition,EMD)和变分模态分解(Variational Mode Decomposition,VMD)是常用的生命体征信号分离方法.EMD方法无严格的数学理论基础,存在模式混叠问题.2009年EEMD(Ensemble Empirical Mode Decomposition)方法被提出[2 -3 ] ,改善了EMD分解中的模式混叠问题.针对EEMD方法噪声去除不完全的问题,CEEMD(Complete Ensemble Empirical Mode Decomposition)方法在2011年被提出[4 ] .Dragomiretskiy and Zosso[5 ] 提出的VMD方法是一种完全非递归的信号分解算法,相较于EMD算法分解过程中模态分量个数的不确定性,VMD方法可人为规定模态分解个数[6 ] .VMD方法的模态个数确定具有主观性,影响了信号分解的可靠性,针对VMD方法可靠性低的问题,本文提出了改进的VMD方法,该方法可自适应确定所分解的模态分量个数. ...
基于MUSIC算法的生命探测雷达信号处理方法
1
2016
... 本文将生命体征活动近似看作由呼吸和心跳共同引起的胸腔表面的位移振动[7 ] .在目标平静时,健康成年人心跳次数一般为每分钟60~100次,在运动过程中,心率比平时速度快.对于呼吸频率,普通成年人的呼吸频率为每分钟12~20次.表1 为成人体征信号相关指标,从表中可看出人体生命信号是微弱和低速的运动信号. ...
Signal processing for life detection radar based on MUSIC algorithm
1
2016
... 本文将生命体征活动近似看作由呼吸和心跳共同引起的胸腔表面的位移振动[7 ] .在目标平静时,健康成年人心跳次数一般为每分钟60~100次,在运动过程中,心率比平时速度快.对于呼吸频率,普通成年人的呼吸频率为每分钟12~20次.表1 为成人体征信号相关指标,从表中可看出人体生命信号是微弱和低速的运动信号. ...
生物雷达信号处理算法研究
1
2011
... 生命信号一般包括心跳信号、呼吸信号以及背景噪声,心跳和呼吸信号可近似看作频率稳定的正弦波信号[8 ] ,生命信号可由式(1) 表示: ...
1
2011
... 生命信号一般包括心跳信号、呼吸信号以及背景噪声,心跳和呼吸信号可近似看作频率稳定的正弦波信号[8 ] ,生命信号可由式(1) 表示: ...
基于调频连续波雷达的多目标生命体征实时检测
2
2021
... 由式(5) 可看出,差频信号相位部分ϕ b R 为线性关系,目标的极小位移会引起相位的较大变化,为了测量小尺度振动,在目标距离单元测量FMCW信号随时间的相位变化[9 ] .连续测量值的相位随物体移动距离ΔR 的变化如式(6) 所示.可以看出,相位变化很好地描述了目标微小位移,如当λ = 4 m m Δ R = 1 m m Δ ϕ b = π . ...
... 对经过距离门切换得到目标信号并提取其相位信息,如图3 a所示.由于相位值在- π , π 图3 b的波形.心跳信号比呼吸信号的能量小,因此需对解缠绕后的相位进行差分运算来增强心跳信号.从图3 c可明显看出存在脉冲噪声,中值滤波算法简单,可有效抑制脉冲噪声,保护信号边缘不被模糊,因此可用于消除脉冲噪声[9 -10 ] ,结果如图3 d所示. ...
Realtime multi?target vital signs detection based on FMCW radar
2
2021
... 由式(5) 可看出,差频信号相位部分ϕ b R 为线性关系,目标的极小位移会引起相位的较大变化,为了测量小尺度振动,在目标距离单元测量FMCW信号随时间的相位变化[9 ] .连续测量值的相位随物体移动距离ΔR 的变化如式(6) 所示.可以看出,相位变化很好地描述了目标微小位移,如当λ = 4 m m Δ R = 1 m m Δ ϕ b = π . ...
... 对经过距离门切换得到目标信号并提取其相位信息,如图3 a所示.由于相位值在- π , π 图3 b的波形.心跳信号比呼吸信号的能量小,因此需对解缠绕后的相位进行差分运算来增强心跳信号.从图3 c可明显看出存在脉冲噪声,中值滤波算法简单,可有效抑制脉冲噪声,保护信号边缘不被模糊,因此可用于消除脉冲噪声[9 -10 ] ,结果如图3 d所示. ...
一种针对椒盐噪声的高速自适应中值滤波算法
1
2021
... 对经过距离门切换得到目标信号并提取其相位信息,如图3 a所示.由于相位值在- π , π 图3 b的波形.心跳信号比呼吸信号的能量小,因此需对解缠绕后的相位进行差分运算来增强心跳信号.从图3 c可明显看出存在脉冲噪声,中值滤波算法简单,可有效抑制脉冲噪声,保护信号边缘不被模糊,因此可用于消除脉冲噪声[9 -10 ] ,结果如图3 d所示. ...
A high speed adaptive median filtering algorithm for salt and pepper noise removing
1
2021
... 对经过距离门切换得到目标信号并提取其相位信息,如图3 a所示.由于相位值在- π , π 图3 b的波形.心跳信号比呼吸信号的能量小,因此需对解缠绕后的相位进行差分运算来增强心跳信号.从图3 c可明显看出存在脉冲噪声,中值滤波算法简单,可有效抑制脉冲噪声,保护信号边缘不被模糊,因此可用于消除脉冲噪声[9 -10 ] ,结果如图3 d所示. ...
1
2008
... EMD方法在研究瞬时频率时,提出了本征模态函数(Intrinsic Mode Function,IMF)的概念,是一种将信号分解为一组IMF的方法,其核心是得到一组IMF分量[11 ] .EMD算法存在很多局限性,总结如下: ...
基于VMD消噪处理的滚动轴承早期故障识别
1
2017
... 针对EMD方法存在的上述缺点,提出VMD算法代替EMD算法处理信号.该算法的目的是将原始数据分解为k 个模态分量u k t ωk 附近,存在一定的带宽.这样就将问题转化为使所有模态分量的带宽和最小,VMD算法根据经验规定IMF个数.设需要分解模态分量个数为k ,分解具体步骤如下[12 ] : ...
VMD denoising processing?based early fault recognition method of rolling bearings
1
2017
... 针对EMD方法存在的上述缺点,提出VMD算法代替EMD算法处理信号.该算法的目的是将原始数据分解为k 个模态分量u k t ωk 附近,存在一定的带宽.这样就将问题转化为使所有模态分量的带宽和最小,VMD算法根据经验规定IMF个数.设需要分解模态分量个数为k ,分解具体步骤如下[12 ] : ...
基于VMD?维纳滤波的时间序列去噪
1
2022
... 与EMD算法分解过程中IMF个数的不确定性比较,VMD算法可人为规定IMF的个数,该个数根据经验规定.当规定的分解模态数量过小,会导致欠分解;若规定的分解模态数量过大,则会导致过分解.因此本节采用改进VMD算法确定分解模态的数量[13 ] . ...
Time series denoising based on VMD wiener filter
1
2022
... 与EMD算法分解过程中IMF个数的不确定性比较,VMD算法可人为规定IMF的个数,该个数根据经验规定.当规定的分解模态数量过小,会导致欠分解;若规定的分解模态数量过大,则会导致过分解.因此本节采用改进VMD算法确定分解模态的数量[13 ] . ...
一种基于互相关函数的小波系数相关阈值去噪方法
1
2011
... 互相关系数是表征两个信号相关程度的量.当两信号相关程度越高,则它们的互相关系数值越大[14 -15 ] .当分解的IMF数量最优时,利用VMD对信号分解后的余量是噪声,余量与IMF互不相关[16 ] .因此,本文采用余量与IMF叠加信号的互相关系数确定最优IMF的数量,互相关系数值越小,选取的值越优.设信号经过VMD分解后的余量为m n f n
A wavelet coefficient threshold denoising method based on a cross?correlation function
1
2011
... 互相关系数是表征两个信号相关程度的量.当两信号相关程度越高,则它们的互相关系数值越大[14 -15 ] .当分解的IMF数量最优时,利用VMD对信号分解后的余量是噪声,余量与IMF互不相关[16 ] .因此,本文采用余量与IMF叠加信号的互相关系数确定最优IMF的数量,互相关系数值越小,选取的值越优.设信号经过VMD分解后的余量为m n f n
基于互相关函数和矩阵束算法的电力系统低频振荡在线辨识
1
2015
... 互相关系数是表征两个信号相关程度的量.当两信号相关程度越高,则它们的互相关系数值越大[14 -15 ] .当分解的IMF数量最优时,利用VMD对信号分解后的余量是噪声,余量与IMF互不相关[16 ] .因此,本文采用余量与IMF叠加信号的互相关系数确定最优IMF的数量,互相关系数值越小,选取的值越优.设信号经过VMD分解后的余量为m n f n
Power system low frequency oscillation online identification based on CCF?MP
1
2015
... 互相关系数是表征两个信号相关程度的量.当两信号相关程度越高,则它们的互相关系数值越大[14 -15 ] .当分解的IMF数量最优时,利用VMD对信号分解后的余量是噪声,余量与IMF互不相关[16 ] .因此,本文采用余量与IMF叠加信号的互相关系数确定最优IMF的数量,互相关系数值越小,选取的值越优.设信号经过VMD分解后的余量为m n f n
1
2020
... 互相关系数是表征两个信号相关程度的量.当两信号相关程度越高,则它们的互相关系数值越大[14 -15 ] .当分解的IMF数量最优时,利用VMD对信号分解后的余量是噪声,余量与IMF互不相关[16 ] .因此,本文采用余量与IMF叠加信号的互相关系数确定最优IMF的数量,互相关系数值越小,选取的值越优.设信号经过VMD分解后的余量为m n f n
Research on short?term load forecasting method based on robust multidimensional autoregression
1
2020
... 互相关系数是表征两个信号相关程度的量.当两信号相关程度越高,则它们的互相关系数值越大[14 -15 ] .当分解的IMF数量最优时,利用VMD对信号分解后的余量是噪声,余量与IMF互不相关[16 ] .因此,本文采用余量与IMF叠加信号的互相关系数确定最优IMF的数量,互相关系数值越小,选取的值越优.设信号经过VMD分解后的余量为m n f n





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}