


撞击构造是月球和其他类地行星表面最主要的地质特征之一,一直以来是行星科学研究的重要方面(图1).而撞击坑研究的第一步是对其进行识别和统计.传统的建立撞击坑数据库的方法是通过人工进行目视识别.近十年来,伴随着遥感撞击坑地形和影像数据的不断积累,Head et al[1],Povilaitis et al[2]和Robbins et al[3]更新了月球撞击坑数据库.其中最新的Robbins et al[3]数据集包含了直径大于1 km的撞击坑,总体撞击坑数量超过两百万个.然而由于数量巨大,人工验证这些撞击坑识别结果的准确性是一个巨大的工程.并且采用人工方法进一步识别更小的撞击坑将十分困难.除此以外,不同专家对于撞击坑的认定具有极大的差异性,已有的研究发现专家公认的撞击坑可能只有全部撞击坑的75%[4].采用高效、稳定的自动识别方法已经成为撞击坑识别的必然趋势.
图1
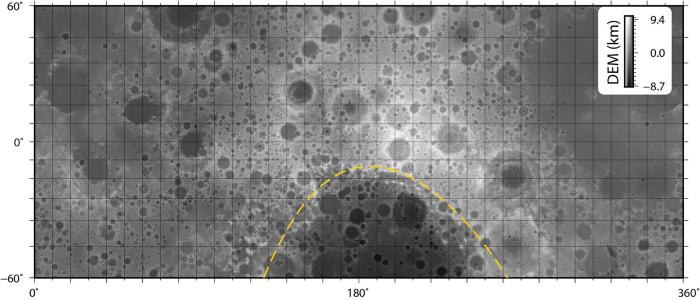
图1
月球全球地形图(黄色虚线是南极⁃艾特肯盆地边界)
Fig.1
Global topographic map of the Moon (The yellow dished line is the boundary of the South Pole⁃Aitken basin)
过去20年来,伴随着计算机硬件水平的提高,尤其是图形处理器并行计算的实现,深度学习算法在各个领域得到应用.用于图像识别的卷积神经网络(convolutional neural network,CNN)也成为在撞击坑识别方面的可行选择.Emami et al[5]在2015年完成了第一个用于撞击坑探测的CNN程序.Silburt et al[6]首先使用用于图像分割的Unet网络得到撞击坑的边缘,再采用圆形匹配技术提取撞击坑信息.Yang et al[7]使用区域全卷积网络(R⁃FCN),对嫦娥一号和二号的数值高程数据进行撞击坑识别.Benedix et al[8]使用YOLO V3识别火星撞击坑.这些研究均面向大区域及全球撞击坑数据库实现撞击坑自动识别.但是不同区域的撞击坑因为撞击区域表面物质年龄、成分、孔隙度、结构的差异,在形貌上也存在差异,识别难度和主要特征也将有所不同.因此,对于不同的地质区域单独训练神经网络有望提高区域识别效果.本论文使用了南极⁃艾特肯盆地区域的数值高程图(Digital Elevation Model,DEM)对该区域单独进行训练和识别,以期在该区域实现更加准确的撞击坑自动识别.
月球表面小型撞击坑的密度分布反映了地质单元的年龄:地质单元上的撞击坑越多,相应的月表年龄越古老.统计地质单元上撞击坑的直径⁃频率分布曲线(CSFD)[9]是对其进行相对定年的主要方法[10].再结合阿波罗岩石样本的同位素绝对定年结果,可以进一步估算地质单元的绝对模式年龄.基于此方法,Fassett et al[10]和Orgel et al[11]已实现对月球主要撞击盆地的相对和绝对定年,但是中型撞击坑的定年还很缺乏.目前的最新的月球撞击坑数据库仅有四分之一的撞击坑包含相对定年结果,并且只精确到月球地质历史的六个年代[12],这大大限制了对月球撞击坑动力学和地质演化历史的研究[13-14].基于对小型撞击坑的自动识别结果,本研究进一步对四个典型中型撞击坑内的小型撞击坑的直径⁃频率分布进行了统计,估算了四个典型中型撞击坑的绝对模式年龄,提供了一种利用自动识别的撞击坑对中型撞击坑定年的方法.该方法有望进一步应用于月球所有中型撞击坑定年,实现绝对模式年龄的确定,弥补中型撞击坑定年结果的缺乏.
1 自动识别算法和识别过程
1.1 数据集准备
月球上常用于撞击坑识别的数据有数字高程模型(DEM)、可见光图像、红外图像等光学影像.虽然可见光图像的高分辨率能保留更多的撞击坑形态特征,但是这些数据受到光照角度的影响,如果直接用于网络训练将难以得到可靠的自动识别结果.高程模型的分辨率虽不及光学影像,但它直接对应撞击坑的三维地形,并且不受到光照角度的影响.本论文使用了空间分辨率为60 m的数字高程模型SLDEM2015[15],能够对直径2 km以上的撞击坑进行很好地识别.该数字高程模型通过融合月球勘测轨道飞行器(LRO)上搭载的月球轨道飞行器激光测高仪(LOLA)数据和月亮女神(SELENE,又称KAGUYA)上搭载的地貌摄像机数据得到[16],纬度为-60°~60°.本论文将数据裁剪成为30 km×30 km的子区域输入YOLO V5目标探测系统.裁剪时采用螺旋采样[17]方法:以极点为起点构造一系列等距螺旋线,以螺旋线上等距离、均匀分布在球面的采样点作为裁剪区域的中心点,即可得到均匀覆盖球体的、大小相等的采样区.我们在采样时保证每个裁剪区域与相邻区域有50%的重叠,避免图像边缘区域撞击坑的遗漏,总共获得了16144个图像样本.
有监督的机器学习算法需要使用含有专家标注的基准真相(Ground Truth)数据集训练模型.本论文使用最新的由Robbins et al[3]建立的月球撞击坑数据库作为基准真相数据集,此数据库包含了全月球表面直径大于1 km的撞击坑.本文使用了其中南极⁃艾特肯盆地区域中直径2~15 km撞击坑的中心点坐标与直径数据.将数据库中撞击坑的经纬度坐标和直径换算成相应样本图片中的相对坐标,一同输入程序中进行训练.
随机将图像样本的80%划分为训练集,剩余20%为测试集(图2).训练集包含12915张图片样本,而每张图片样本与专家识别的撞击坑数据文件相对应.测试集约有3229张样本(及相应标注文件),用于评估网络在真实环境的泛化性能.训练过程中,还会动态地将部分训练集作为验证集,调整训练超参数,不断优化网络能力,提升训练结果.
图2
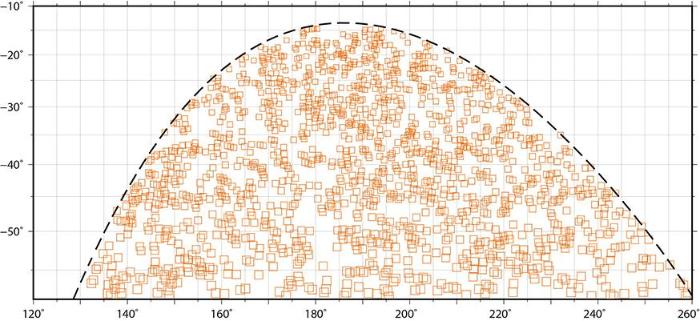
图2
测试集样本示意图(黑色虚线是SPA盆地边界,橙色矩形区域代表测试集样本区域)
Fig.2
Samples in the testset (The black dotted line is the boundary of the SPA basin,the orange rectangles represent the test set sample areas)
1.2 卷积神经网络
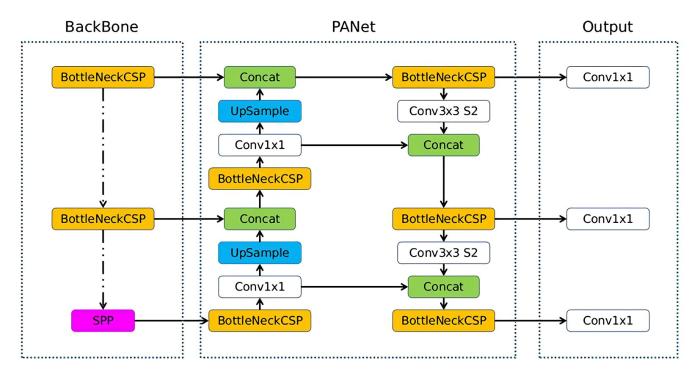
YOLO V5的结构包含BackBone和路径聚合网络(Path Aggregation Network,PANet;图3).其中,BackBone使用跨阶段局部网络(Cross Stage Partial Networks,CSPNet),从输入的样本中分离出特征信息.CSPNet将梯度变化集成到了特征图中,解决了大尺度卷积神经网络优化中的梯度信息重复问题,减少了参数量、模型大小和模型的浮点运算数,并保证了探测的速度和准确率.BackBone网络还使用空间金字塔池化(Spatial Pyramid Pooling,SPP)将任意大小的特征图转化为固定大小的特征图,让YOLO V5可以输入任意长宽比和大小的图像.PANet作为Neck融合不同尺寸的特征集成特征金字塔.特征金字塔能够增强模型探测不同尺度目标的能力,增加模型自底向上的路径,改善底层信息的反向传播,避免因为网络深度增加造成的网络退化,增强底层特征的小尺度目标识别效果.同时,采用自适应特征池来恢复每个识别候选区域与所有特征层之间的破损信息路径,并在每个特征层上对每个候选区域进行聚合,避免任意分配.
图3
1.3 网络训练和评估
本论文采用小批量梯度下降法(Mini⁃Batch Learning)训练网络,将训练集划分为十份,先用第一份数据训练得到初步结果,再继续加入数据训练,直到达到目标效果.这种方法每次都使用一份数据对超参数进行迭代,比起只使用一个批量可以减少网络到达最佳效果的迭代次数,并有着更好的训练结果.
其中A,B分别代表两个撞击坑,公式的分子、分母分别表示两撞击坑交集的面积和并集的面积.如果自动识别的撞击坑与专家数据库中相应撞击坑的IoU大于0.5,则视为识别结果与Robbins的专家标注一致.IoU的计算同时考虑了两撞击坑距离和直径的相互关系,与Salamunićcar[20]计算撞击坑相对距离差的标准相一致.
本论文使用准确率、召回率以及F1值来衡量算法在验证集上的表现.其中准确率
而召回率
其中,真阳性
准确率和召回率存在负相关性:如果程序只有在非常确定时才将目标识别为撞击坑,就会拥有较高的准确率;反之,如果程序倾向于将不确定的目标识别为撞击坑,就会拥有较高的召回率.
2 中型撞击坑绝对模式年龄估算
2.1 地质单元划分
对中型撞击坑,需要选择撞击同期产生,且未经后期其他地质事件改造的区域用于测定中型撞击坑的年龄.同时,需要选择足够大的区域以保证有足够多的小型叠加撞击坑用于定年.在选择定年区域时,本论文参考了Kirchoff et al[24]的标准:首先需要避免次级撞击坑的高密度区域.次级撞击坑是由大型撞击的碎片产生的,撞击坑数目异常的次级撞击坑区域(例如辐射状的链形和集群区域)需要排除.其次是需要划定面积足够大的连贯地质单元,使得小型叠加撞击坑的统计结果达到足够定年水平.并且南极⁃艾特肯盆地中部分撞击坑内部存在被熔岩流覆盖的现象.撞击与熔岩流覆盖发生在不同的时间,CSFD定年结果为熔岩流覆盖发生的时间,即撞击坑年龄下限[25-26].本研究最终在该区域431个中型撞击坑中选择了Bose[27](中心坐标169.35°E,53.95°S,直径92.55 km)、Von Kármán[28](中心坐标176.25°W,44.45°S,直径186.35 km)、Koch[27](中心坐标150.33°W,42.13°S,直径94.7 km)和Lundmark[29](中心坐标152.56°W,38.87°S,直径103.44 km)撞击坑进行定年,并采用这些撞击坑底部区域对其进行定年.其中Von Kármán撞击坑底部被熔岩流再铺平,所以定年结果为撞击坑年龄下限.
2.2 定年方法
Neukum et al[22]使用多项式来拟合澄海中18个区域的撞击坑统计结果,得到函数关系式
来表达撞击坑的直径与数量的关系.其中,N代表每平方公里直径大于给定数值D的撞击坑数量,
月表年龄越老的地方,撞击坑累积越多.这一函数在月球的不同年龄区域需要不同的系数
3 结果和讨论
3.1 南极⁃艾特肯盆地撞击坑自动识别结果
训练得到的CNN网络在测试数据集上性能良好,显示网络已经学习到了南极⁃艾特肯盆地小型撞击坑的特征,能很好地识别南极⁃艾特肯盆地的小型撞击坑.图4结果中代表自动识别结果的红点和代表专家识别撞击坑的黑圈在图中几乎都能一一对应,代表机器识别的结果很好.测试集上网络的准确率为0.96,召回率为0.95,F1值为0.95.准确率0.96意味着本网络已准确学习了南极⁃艾特肯盆地撞击坑的特征;召回率达到0.95说明找到了绝大部分Robbins数据库[3]中的撞击坑,并且远高于Wetzler et al[33]估算的人工重新探测撞击坑召回率0.75.这意味着本论文对撞击坑自动识别的效果已经至少达到甚至超过了专家的识别水平.
图4
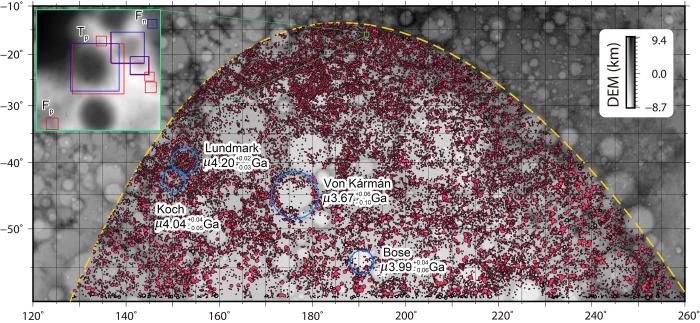
图4
南极⁃艾特肯盆地撞击坑识别结果分布图
Fig.4
Distribution of impact crater identification results in the South Pole⁃Aitken basin
最终整理得到机器识别撞击坑数目为39684个,而Robbins[3]数据库在研究区域共有32861个撞击坑.在进一步对比本论文识别的撞击坑与Robbins[3]数据库的差异时(图5),进一步参考月球勘测轨道器的广角相机(WAC)图像[34],并使用圆度作为检测目标是否为撞击坑的指标.这里的圆度定义为撞击坑内部面积(撞击坑边缘圈定的闭合区域面积)与撞击坑最小外接圆面积的比值[35].将DEM图像和WAC图像中撞击坑边缘圆度大于0.62的识别结果视为真撞击坑.验证后发现部分程序识别出,但是专家未标注的假阳性目标(如:图5a中心坐标128.68ºW,58.67ºS,直径6.11 km;图5b中心坐标128.01ºW,50.98ºS,直径2.03 km)是Robbins[3]遗漏的撞击坑.同时,部分程序未识别出,但是存在于Robbins[3]数据库中的假阴性目标(如:图5c中心坐标172.42ºW,42.21ºS,直径2.89 km;图5d中心坐标131.86ºW,46.63ºS,直径6.06 km)并不具备圆形边缘,经过验证后发现是人工错误识别的目标.这说明自动识别结果可以对人工识别的结果进检验和纠正.
图5
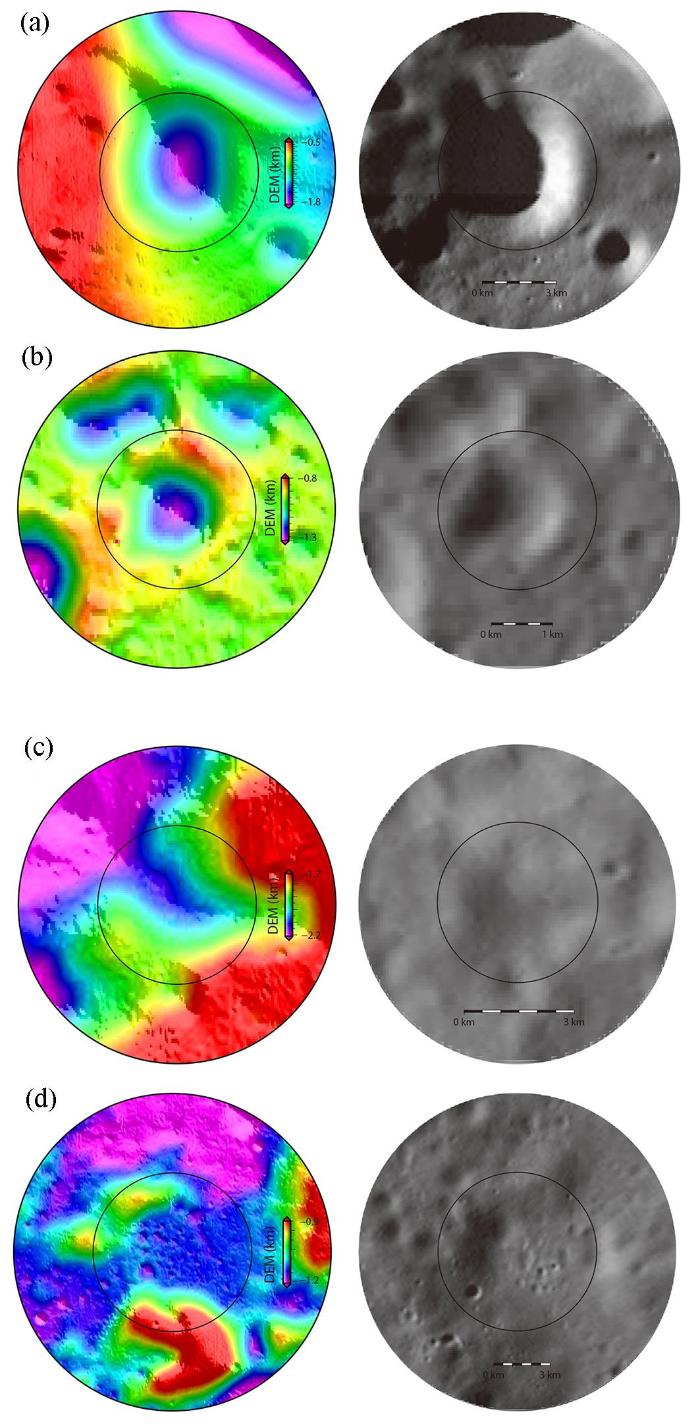
图5
(a~b)本研究自动识别出,但是未被专家标注的新撞击坑;(c~d)验证后认定为专家误标注的撞击坑(左图为DEM图像,右图为WAC图像)
Fig.5
(a~b) Newly discovered impact cratersbut not labeled by experts,(c~d) impact craters misidentified by experts after verification in this study (The four images on the left are DEM images of the impact craters,and the four images on the right are WAC images of the impact craters )
3.2 中型撞击坑模式年龄估算结果
为进一步评估本论文撞击坑自动识别的结果,并作为本结果的一个应用,本论文进一步对四个中型复杂撞击坑进行定年.用于定年的地质单元圈定为撞击坑底部的连续平坦区域(图6).本论文对Von Kármán撞击坑定年结果为
图6
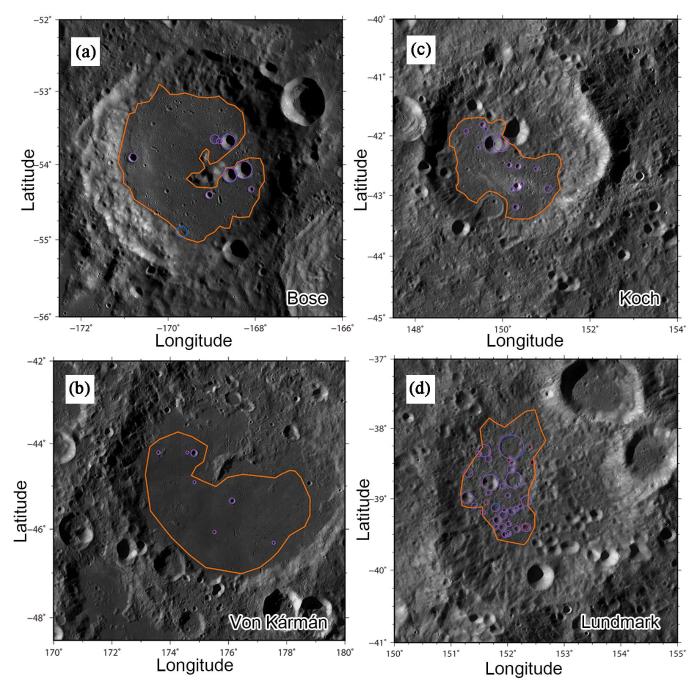
图6
四个中型撞击坑定年区域示意图,背景图为WAC影像(黄线内为用于定年的区域,圆圈代表本论文自动识别的2~15 km撞击坑位置(红色)以及Robbins数据库中的撞击坑位置(蓝色))
Fig.6
Map of four mid⁃sized impact crater dating areas with WAC images (The area within the yellow line is the dating unit,and the different circles represent the predicted crater location (red) and the Robbins database crater location(blue))
图7
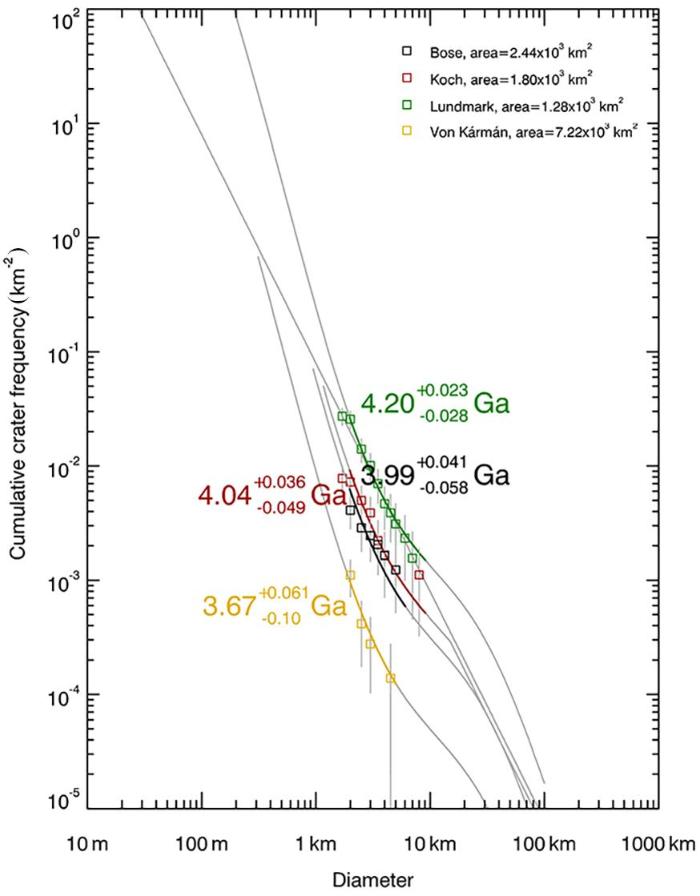
图7
撞击坑定年结果(不同颜色的曲线分别代表Bose(黑色)、Koch(红色)、Lundmark(绿色)、冯·卡门(黄色)的定年结果,灰色曲线为相应定年结果的等时线)
Fig.7
Impact crater dating results ( The curves in different colors represent the dating results of Bose (black),Koch (red),Lundmark (green),and Von Karman (yellow). The gray curves are the isochron)
此外,本论文选取的四个中型撞击坑半径在90 km以上,并且年龄在前酒海纪到雨海纪范围内.对于半径更小、更年轻的中型撞击坑,其表面缺少直径2~15 km的小型撞击坑的积累,难以获得足够的小型撞击坑样本用于定年[24].采用更小的小型撞击坑数据库不仅能使定年结果更精准,也能对更多的中型撞击坑进行定年.因此,下一步的研究目标是对更小的撞击坑实现自动识别和剔除次级撞击坑,以完善中型撞击坑定年结果.此外,有望通过对定年区域圈定、小型撞击坑统计、中型撞击坑定年这一系列工作流程进行整合,实现对全月中型撞击坑的绝对模式年龄确定.
4 结 论
本论文使用了Robbins人工识别的撞击坑数据库[20],基于数字高程数据训练了用于自动识别南极⁃艾特肯盆地小型撞击坑的YOLO V5卷积神经网络目标检测系统.训练所得网络在测试集上取得了准确率和召回率均超过0.95的优秀表现,说明网络已经学习到了南极⁃艾特肯盆地简单撞击坑的特征,对该区域撞击坑能够进行准确、全面的识别.
结合DEM和WAC数据,本论文对与专家标注不符的自动识别结果进行了分析,发现了Robbins数据库[3]中的多个误标记撞击坑,说明撞击坑自动识别可以对专家识别结果做进一步的验证.
通过对四个典型中型撞击坑进行定年,本论文进一步验证了撞击坑自动识别结果的可靠性,并验证了自动识别撞击坑数据库用于定年的可行性,该方法有望进一步实现对中型撞击坑的自动计数定年.
参考文献
Global distribution of large lunar craters:Implications for resurfacing and impactor populations
Crater density differences:Exploring regional resurfacing,secondary crater populations,and crater saturation equilibrium on the moon
The variability of crater identification among expert and community crater analysts
Lunar crater detection via region⁃based convolutional neural networks
∥
Lunar crater identification via deep learning
Lunar impact crater identification and age estimation with Chang'E data by deep and transfer learning
Deriving surface ages on Mars using automated crater counting
Crater size distributions and impact probabilities on Earth from lunar,terrestrial⁃planet,and asteroid cratering data
A new lunar impact crater database
∥
A new lunar digital elevation model from the Lunar Orbiter Laser Altimeter and SELENE Terrain Camera
Lunar global digital terrain model dataset produced from SELENE (Kaguya) terrain camera stereo observations
∥
Suite of functions to perform uniform sampling of a sphere
(https://github.com/AntonSemechko/S2-Sampling-Toolbox),
You only look once
:Unified,real⁃time object detection∥
Ultralytics/yolov5:V4. 0⁃Nn
Open framework for objective evaluation of crater detection algorithms with first test⁃field subsystem based on MOLA data
Map⁃projection⁃independent crater size⁃frequency determination in GIS environments⁃New software tool for ArcGIS
Cratering records in the inner solar system in relation to the lunar reference system
Planetary surface dating from crater size–frequency distribution measurements:Partial resurfacing events and statistical age uncertainty
Ages of large lunar impact craters and implications for bombardment during the Moon's middle age
Effects of lava flows on lunar crater populations
Mapping lunar maria extents and lobate scarps using LROC image products
∥
Absolute model ages of light plains in the southern lunar hemisphere
∥
A study of lunar impact crater size⁃distributions
Hazards due to Comets and Asteroids
,
Learning to detect small impact craters
∥
New mosaicked data products from the LROC team
∥
Improved LOLA elevation maps for south pole landing sites:Error estimates and their impact on illumination conditions

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}